


3次元空間上で正確な位置決めができる、小型デスクトップロボットの組み立てキット。Z軸の先端へさまざまなツールを取り付けることで、プロッターやチップマウンターはもちろん、半田付けロボット、3Dプリンターにも自在に変化する。また、Y軸に可動式門型構造を採用したことにより、場所を取ることなく高速な動作が可能。高い応用性と自由な拡張性で、世界に1台だけの3軸制御マシン作りを実現する。
開発ポイント
さまざまな動作や機能を実現
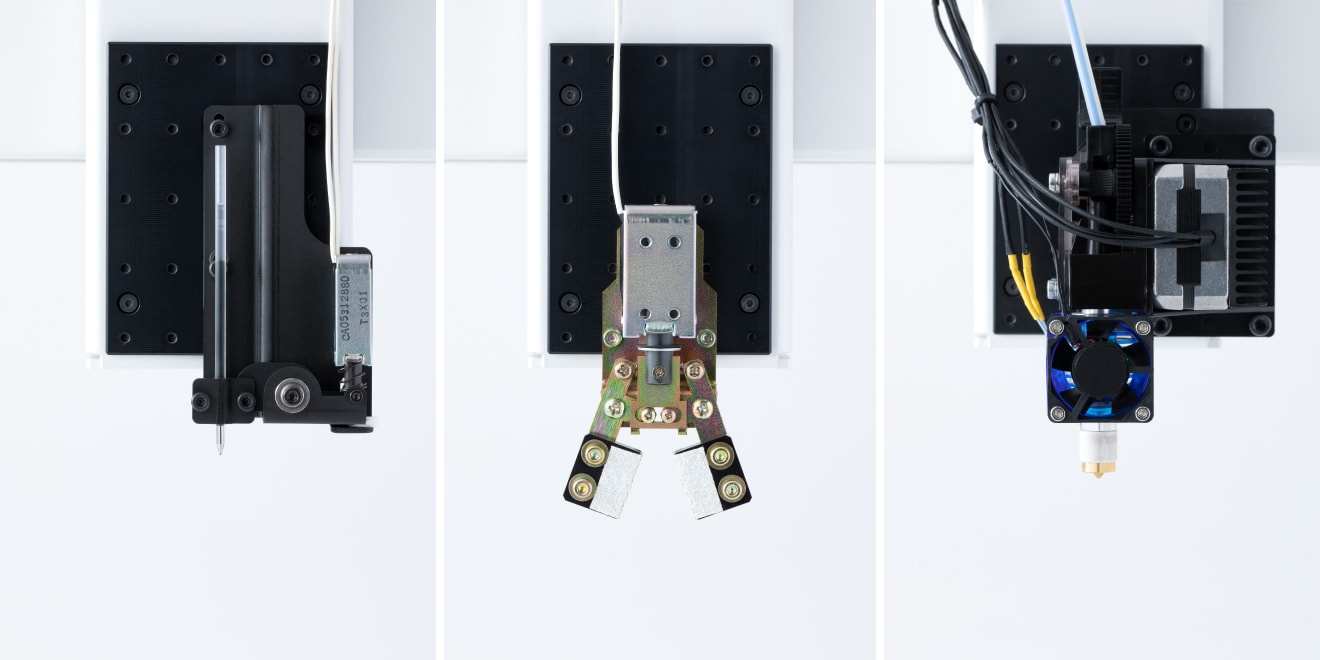
▲ 左より「ペンプロッターヘッド」「チャック」「3Dプリンターヘッド」の取り付けイメージ。
Z軸の先端へツールを取り付けることにより、アイデア次第で多様な動作や機能を実現することができる。
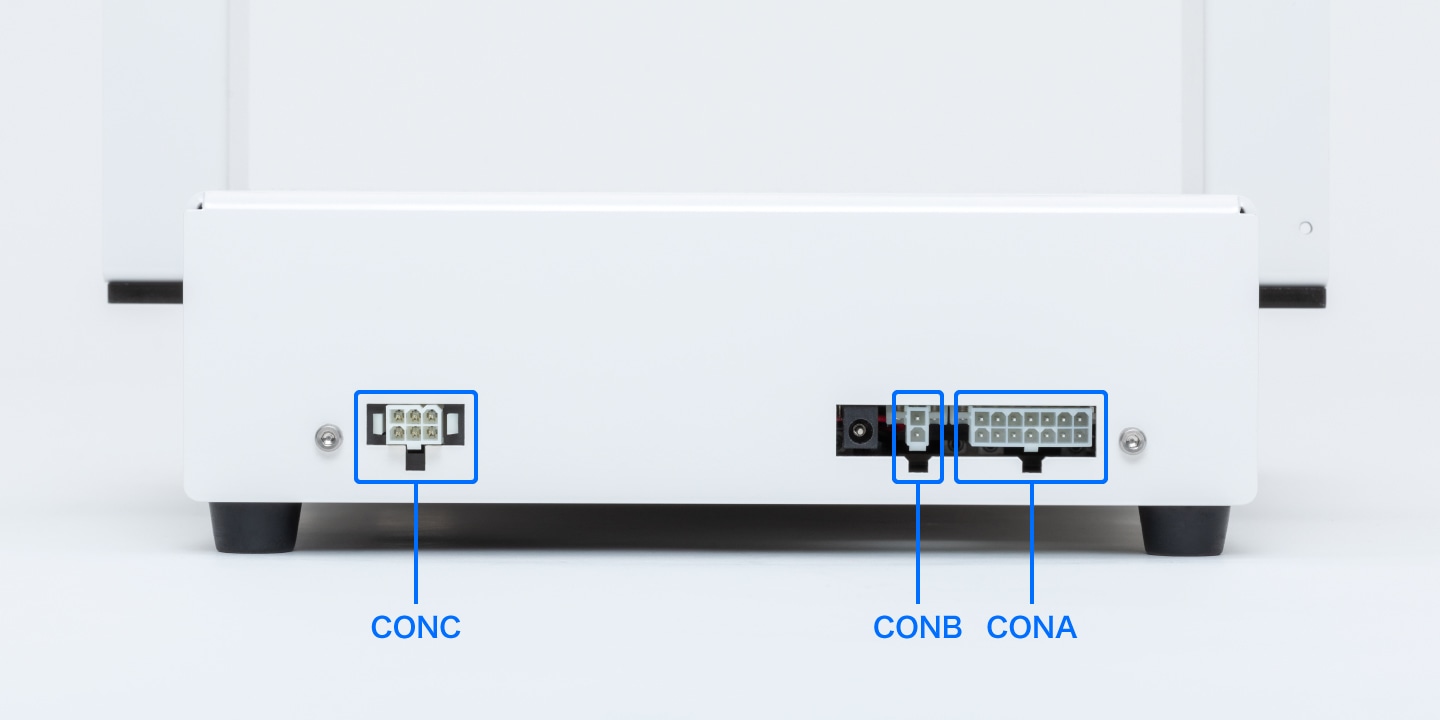
本体底面にモータードライバを搭載

本体底面に取り付けられるモータードライバは、背面からPLCと接続することが可能。PLC用の電源端子も備えており、電源を別途用意する必要のない機能的な設計となっている。
※PLC用電源端子を使用する場合、PLCの消費電力は8W以下である必要があります。
※オプション品のモータードライバセットが必要です。(商品ページへ)
優れたコストパフォーマンス
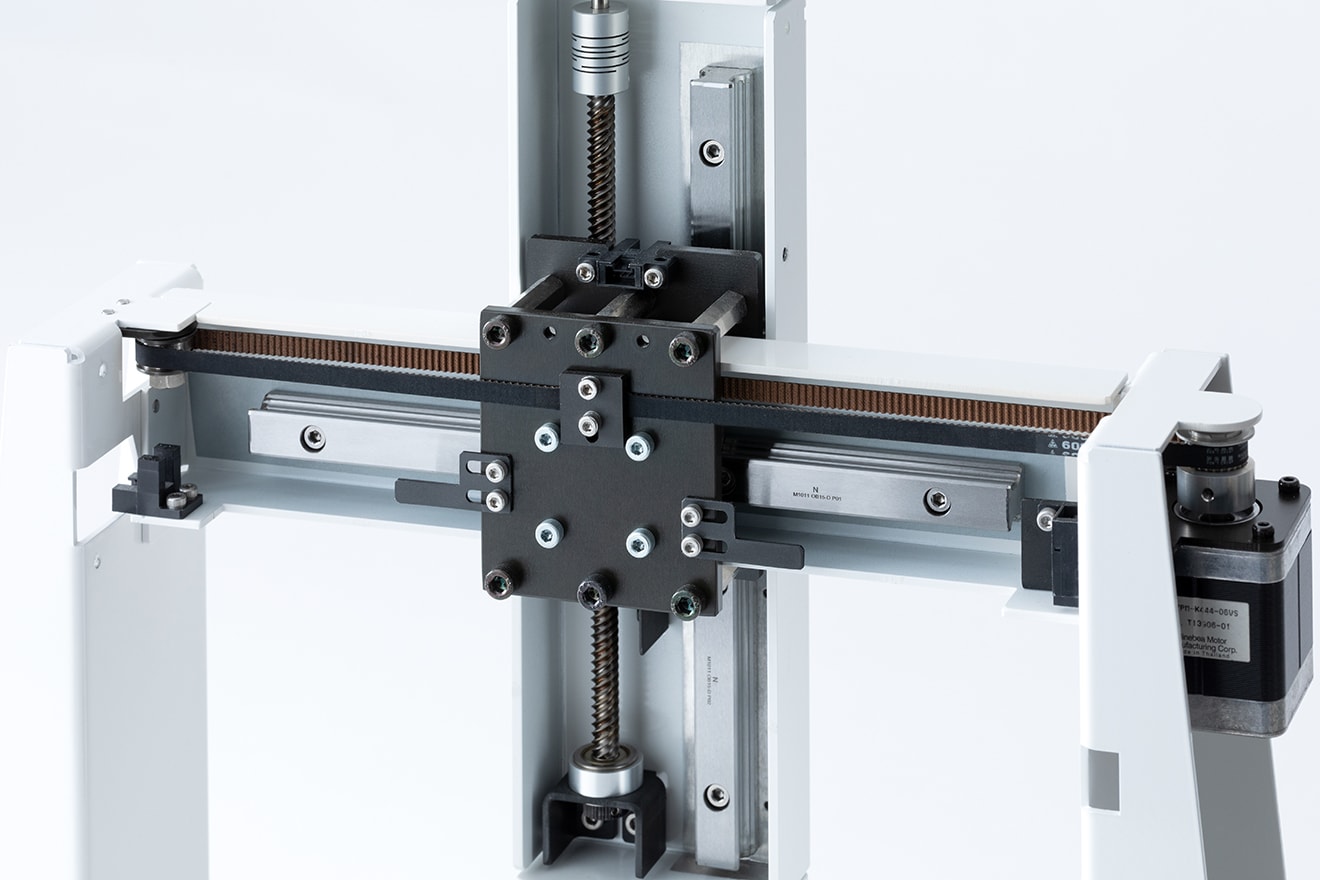
低価格ながらも全軸リニアガイドを使ったガタの無い滑らかな動作が可能で、本格的な高速動作も安心してお使いいただけます。
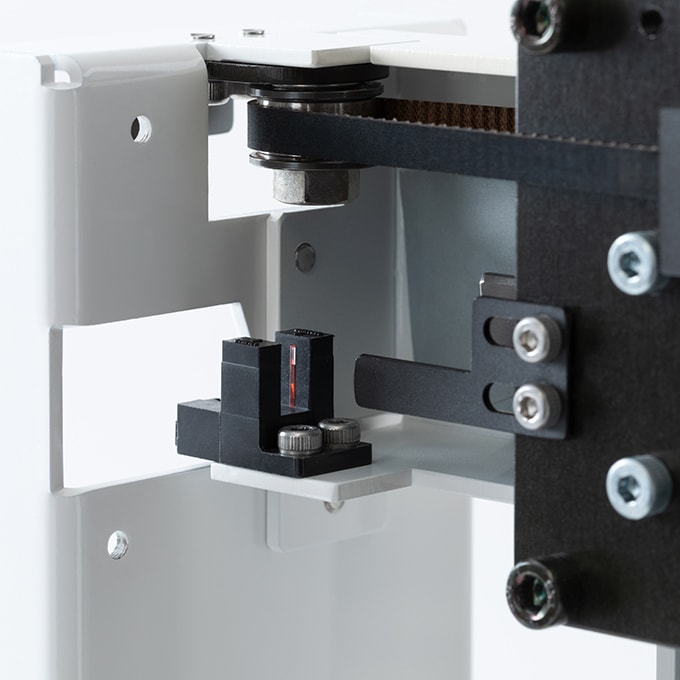
リミット検出(オプション品)
オプション品のリミットセンサーを両端に取り付ければ、動作に合わせて原点方向を選択することも可能。
※Z軸は片側のみです。
※オプション品のリミットセンサーセットが必要です。(商品ページへ)
Engineer : Masanori Shibata
Editor : Keita Fukasawa
Photographer : Kota Sugawara
外形寸法

製品構成

ロボット本体

配線用ケーブル
その他、ご用意いただくものについてはこちらをご覧ください。
仕様
ストローク
ストローク
XYZ軸:160mm
Z軸最大積載重量(ヘッド部)
Z軸最大積載重量
(ヘッド部)
1.0kg
※スリープ電流0.3A時
最大送り速度
最大送り速度
XY軸:400mm/sec
Z軸:200mm/sec
分解能
分解能
XY軸:15.625μm
Z軸:3.90625μm
※マイクロステップ1/16時
リミットセンサー
リミットセンサー
XY軸:両側
Z軸:片側
※リミットセンサーセット装着時のみ使用可能
案内形式
案内形式
リニアガイド
送り形式
送り形式
XY軸:タイミングベルト
Z軸:多条ネジ - 樹脂ナット
電装部
電装部
ドライブ基板:TRIO、PLC中継基板
電源:AC100V50/60Hz
消費電力:60W
※モータードライバセット装着時のみ
重量
重量
15.2kg
ピンアサイン表
| CON番号 | 名称 | 割付表 | ||
|---|---|---|---|---|
| CONA ※1 | 制御用端子 | PIN | 機能 | 備考 |
| 1 | X-STEP | シンク出力(24V)に対応 ※2 | ||
| 2 | Y-STEP | |||
| 3 | Z-STEP | |||
| 4 | X-DIR | |||
| 5 | Y-DIR | |||
| 6 | Z-DIR | |||
| 7 | AUX | |||
| 8 | リミットセンサーX+ | リミットセンサーと直接接続 ※3 | ||
| 9 | リミットセンサーX- | |||
| 10 | リミットセンサーY+ | |||
| 11 | リミットセンサーY- | |||
| 12 | リミットセンサーZ+ | |||
| 13 | GND | |||
| 14 | ||||
| ※使用コネクタ:モレックス 5569-14 ※リミットセンサー:オムロン EE-SX97シリーズ(NPN出力) |
||||
| CONB ※1 | PLC用電源端子 | PIN | 機能 | 備考 |
| 1 | 24V | 接続PLCの消費電力8W以下のこと 8Wを超える場合は別途電源が必要 |
||
| 2 | GND | |||
| ※使用コネクタ:モレックス 5569-02 | ||||
| CONC ※4 | 制御用端子 | PIN | 機能 | |
| 1 | ユーザーにて割り当てます | |||
| 2 | ||||
| 3 | ||||
| 4 | ||||
| 5 | ||||
| 6 | ||||
| ※使用コネクタ:モレックス 5559-6P | ||||
- モータードライバセット装着時のみ使用可能
- PIN7はTRIOのCON7を制御できます。本製品ではTRIOのCON7には4W以下のものを繋いでください。4Wを超えるものに関してはCONCをお使いください。
- リミットセンサーセット装着時のみ使用可能
- ツール用ケーブル装着時のみ使用可能
内部回路図
モータードライバセットではモータードライバに「TRIO」を使用しており、PLCで制御できるようにPLC中継基板を間に挟んであります。
PLCと「TRIO」を直接接続すると正常に動作しないため、PLCはPLC中継基板と接続するようにしてください。
ステッピングモーター
仕様
モーターサイズ:42mm角 × 48mm
ステップ角:1.8度
定格電圧:3.96V
定格電流:1.2A/相
巻線抵抗:3.3Ω
巻線方式:ユニポーラ型
※付属ステッピングモーター以外のモーターでの動作は想定しておりません。
結線表

| 相 | A | A COM | A | B | B COM | B |
| PIN | 4 | 5 | 6 | 3 | 2 | 1 |
製品の拡張性
■ Z軸への取り付け
Z軸には取り付け用のねじ穴(M3)が4個あります。ツールマウントなどの取り付けにお使いください。


■ ツールマウントへの取り付け
ツールマウントには取り付け用のねじ穴(M3)が25個あります。チャックなどの取り付けにお使いください。
※ツールマウントはオプション品です。(商品ページへ)


■ Y軸ベースへの取り付け
Y軸ベースには取り付け用のねじ穴(M4)が4個あります。ワークテーブルなどの取り付けにお使いください。

使用例

使用条件
| ■ マイクロステップ数 | |
|---|---|
| XYZ軸 | 1/16 |
| ■ ドライブ電流 | |
| XZ軸 | 0.8A |
| Y軸 | 1.6A |
| ■ スリープ電流 | |
| XZ軸 | 0.4A |
| Y軸 | 0.8A |
| 最高速度 | 400mm/sec(F24000) |
| 描画速度 | 15mm/sec(F900) |
| 描画時間 | 約10.5分 |
| 制御ソフト | USBCNC V4 |
| CAD | Illustator |
| CAM | Cut2D |
■ 備考
USBCNC CPU5で制御しています。
スピンドルのかわりにDCソレノイドを接続しています。ペンがM03で下降、M05で上昇となります。NCプログラムはCut2Dで作成したものをテキストエディタで編集しました。
その他使用例
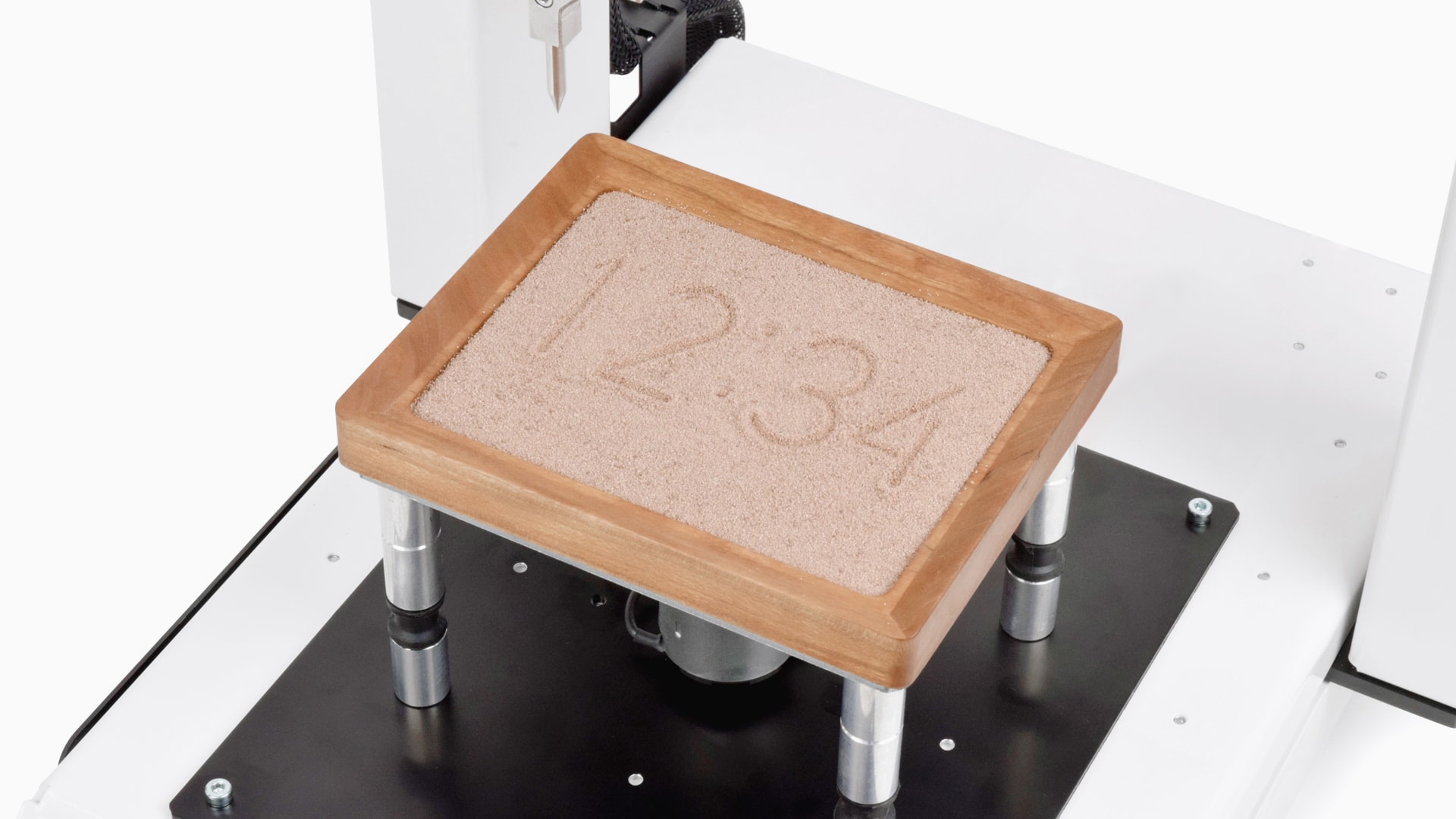
砂書き時計

機械式7セグ時計
キットの組み立てに必要な工具類

六角レンチ
2面幅1.5~5.0mmのものが必要です。(商品ページへ)

T型六角レンチ
2面幅3mmのものが必要です。(商品ページへ)

スパナ
幅5.5mm、8mm、10mmのものが必要です。

+ドライバ
機械、回路の組み立てに使います。

-ドライバ
幅2mmのものが必要です。

ニッパー
配線作業の際、ケーブルの切断や被覆を取るために使います。

ラジオペンチ
回路の組み立てに使います。

マジック(細)
ケーブル識別のために使います。

半田ごて・半田
配線作業の際に必要になります。
制御のために必要なもの

制御装置
本製品にはPLCなどの制御装置は付属しておりません。
お客様にて選定および準備をお願い致します。