


本製品は生産終了しました
本製品は生産終了のため販売を終了いたしました。
3次元空間上で正確な位置決めができる、小型デスクトップロボットの組み立てキット。Z軸の先端へさまざまなツールを取り付けることで、プロッターやチップマウンターはもちろん、半田付けロボット、3Dプリンターにも自在に変化する。また、Y軸に可動式門型構造を採用したことにより、場所を取ることなく高速な動作が可能。高い応用性と自由な拡張性で、世界に1台だけの3軸制御マシン作りを実現する。
開発ポイント
さまざまな動作や機能を実現
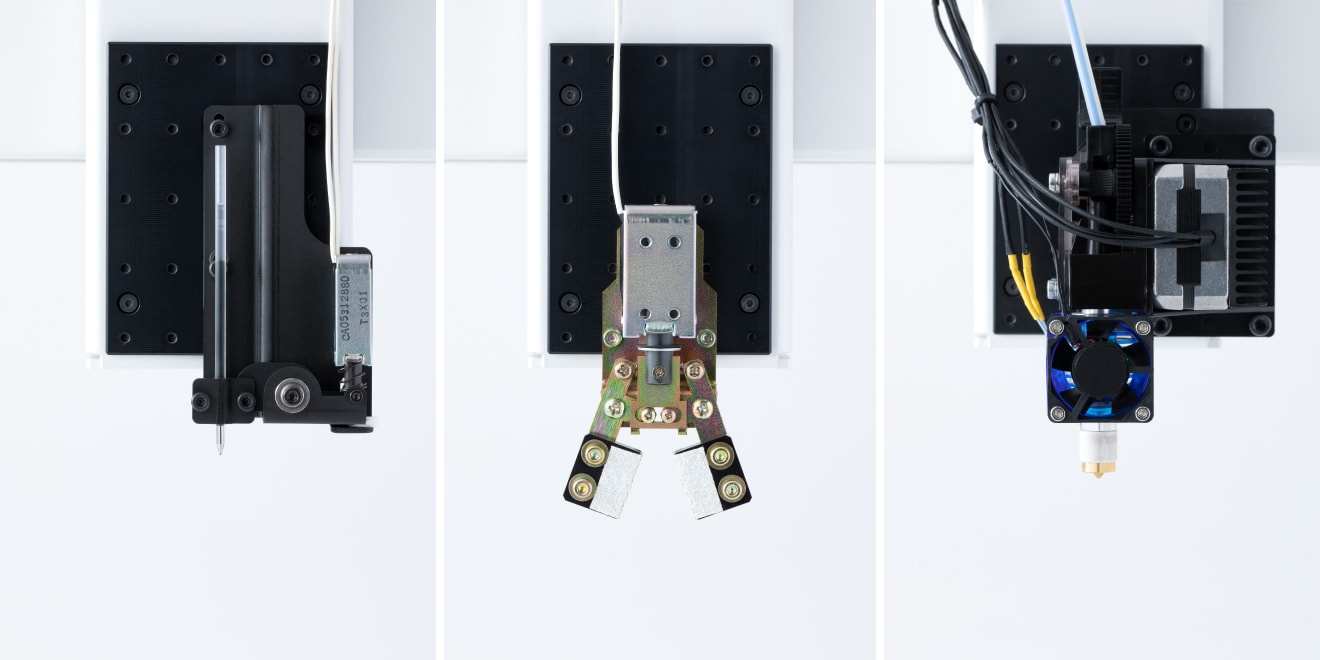
▲ 左より「ペンプロッターヘッド」「チャック」「3Dプリンターヘッド」の取り付けイメージ。
Z軸の先端へツールを取り付けることにより、アイデア次第で多様な動作や機能を実現することができる。
本体底面にモータードライバを搭載

本体底面に取り付けられるモータードライバは、背面からPLCと接続することが可能。PLC用の電源端子も備えており、電源を別途用意する必要のない機能的な設計となっている。
※PLC用電源端子を使用する場合、PLCの消費電力は8W以下である必要があります。
※オプション品のモータードライバセットが必要です。(商品ページへ)
優れたコストパフォーマンス
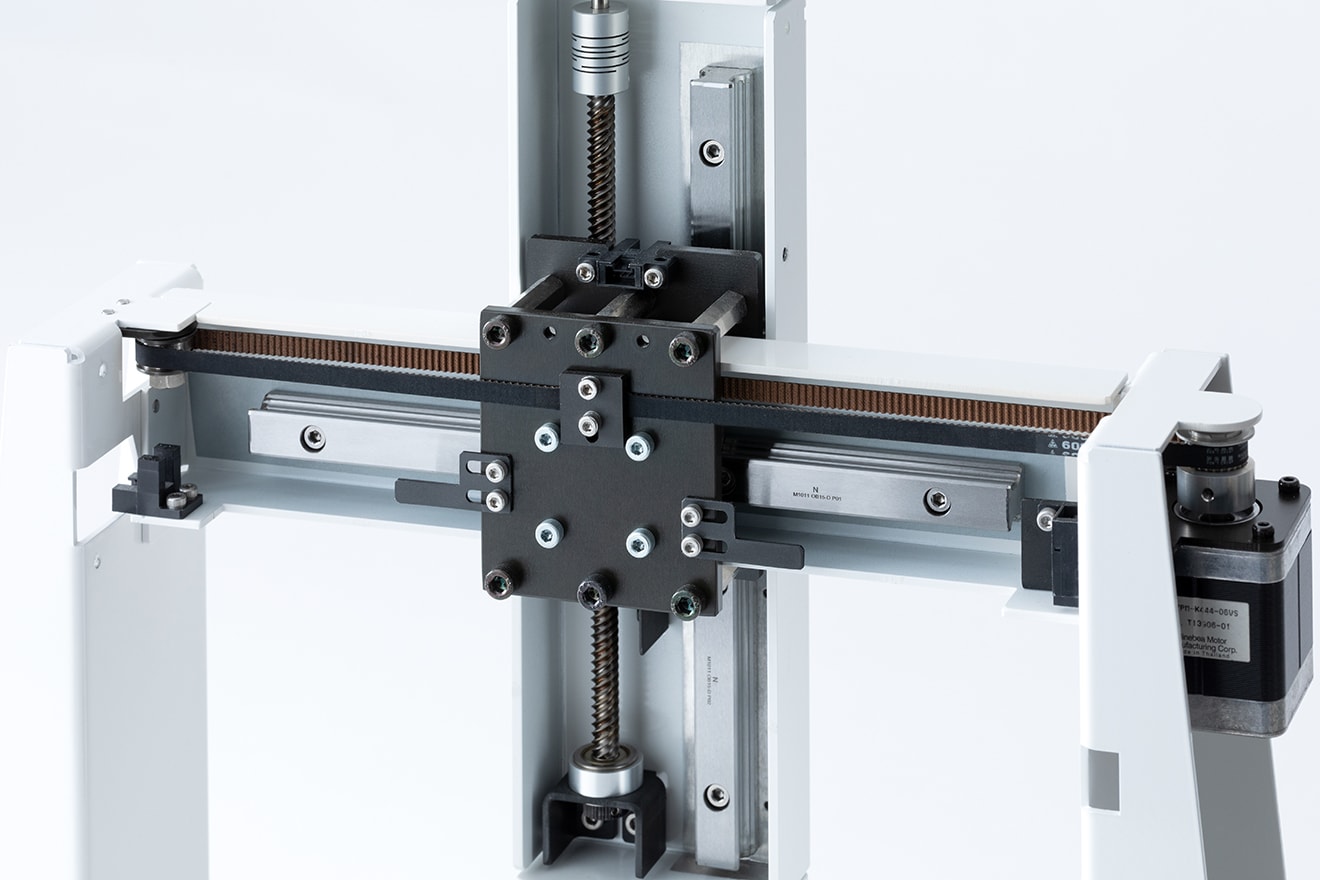
低価格ながらも全軸リニアガイドを使ったガタの無い滑らかな動作が可能で、本格的な高速動作も安心してお使いいただけます。
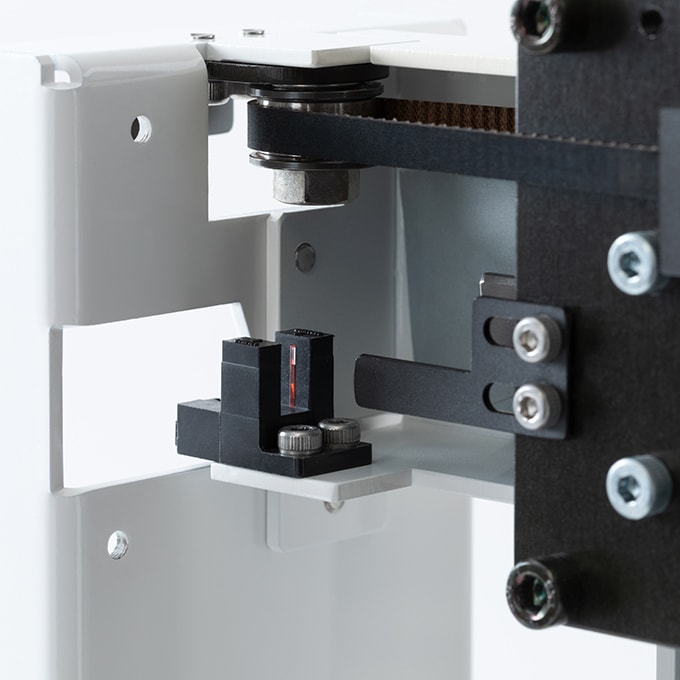
リミット検出(オプション品)
オプション品のリミットセンサーを両端に取り付ければ、動作に合わせて原点方向を選択することも可能。
※Z軸は片側のみです。
※オプション品のリミットセンサーセットが必要です。(商品ページへ)
Engineer : Masanori Shibata
Editor : Keita Fukasawa
Photographer : Kota Sugawara
本製品は生産終了のため販売を終了いたしました。
■ 関連キーワード
XYZロボット / XYZステージ / 直交ロボット / 3軸ロボット / 卓上ロボット / メカトロニクス実習 / メカトロニクス教材 / FA教材 / FA教育 / ロボットキット / 産業用ロボット / 自作ロボット