


Sold Out
Arduinoで動くアクチュエータ 黒田精工 SE3010A-300W-ZZCZ-RH090
商品コード
51843
商品の概要と仕様
ボールねじの種類:転造(C7、軸方向すきま0.020mm以下)
ボールねじの径:Φ10mm
ボールねじのリード:10mm
ストローク:200mm
全長:458.5mm(モータ含む)
リミットセンサ:オムロン EE-SX674
ステッピングモータ:日本電産サーボ 両軸2相ステッピングモータ KH56KM2MP-003
タイトルに「Arduinoで動く」と入れましたのは、当社にてアクチュエータ本体に2相ステッピングモータを取り付け、そのモータからのケーブルの先端にコネクタも取り付けて、Arduino+CNCシールド(現時点で2,630円)に差し込めばすぐに使えるようにしてあるためです。
本体側面にはリミットセンサが装着されていますが、こちらにもケーブルの先端にコネクタを取り付けてありますので、差し込むだけで使用できるようになっております。
ボールねじの径:Φ10mm
ボールねじのリード:10mm
ストローク:200mm
全長:458.5mm(モータ含む)
リミットセンサ:オムロン EE-SX674
ステッピングモータ:日本電産サーボ 両軸2相ステッピングモータ KH56KM2MP-003
タイトルに「Arduinoで動く」と入れましたのは、当社にてアクチュエータ本体に2相ステッピングモータを取り付け、そのモータからのケーブルの先端にコネクタも取り付けて、Arduino+CNCシールド(現時点で2,630円)に差し込めばすぐに使えるようにしてあるためです。
本体側面にはリミットセンサが装着されていますが、こちらにもケーブルの先端にコネクタを取り付けてありますので、差し込むだけで使用できるようになっております。
商品の状態
以降の説明は、下記を前提としています。
・Arduino+CNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版(v1.1)のGrblをアップロードしています。
このページでは大まかな説明のみとなっておりますので、より詳しい内容は、「Arduinoでメカトロニクス製品を動かそう」をご覧ください。
●接続例
Arduinoで動かすには、コネクタを下記の図を参照してCNCシールドに差し込んでください。(CNCシールドのコネクタがピンヘッダのため誤挿入を防止することができません。差し込み箇所を間違えないようご注意をお願いします。)

※本製品に装着されているセンサの電源電圧はDC5〜24Vです。24Vで動作させる場合には回路図の通り、茶色の線をCNCシールドの電源端子の+に接続します。5Vで動作させる場合には、CNCシールドの5V端子に接続してください。
●設定例
下記は本製品を使う場合のArduinoの設定例です。モーターとセンサを先ほどの図の通りに差し込んで頂いた上で、下記の通りに設定しますと、実際のアクチュエータの移動量とgrblに表示される移動量が一致しますし、原点復帰も可能となります。
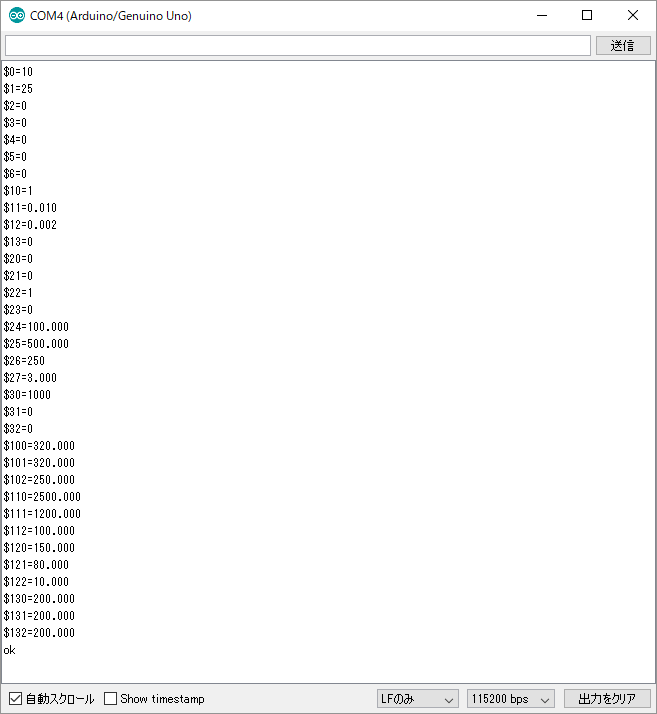
重要な設定項目のみご説明します。
$5 (リミット入力の論理設定)=0(回路図の通りリミットセンサを配線した場合は、検出時にONしますので「0」に設定します。リミットセンサのL端子を+に接続すると論理が反転して検出時OFFとなります。この場合は「1」に設定してください。)
$100 (X軸の1mmあたりのステップ数[step/mm])=320(本製品はボールネジのピッチが20mmなので、360度÷1.8度×16÷10mm=320step/mmとなります。但しArduino基板のマイクロステップの設定は1/16としています。マイクロステップの設定のしかたについては、こちらをご覧ください。)
$110 (X軸の最高速度[mm/min])=2500(モーターの特性に合わせて最適な数値にしてあります。)
$120 (X軸の加減速度[mm/sec^2])=150(モーターの特性に合わせて最適な数値にしてあります。)
●1軸または2軸のみで原点復帰を行う場合の注意点
grblの原点復帰動作はデフォルトでZ軸→XY軸という順序で動作するようになっているため、3軸揃っていなければ完了できません。しかし、プロッタのようにZ軸が不要であったり、1軸だけで使うような用途もあると思います。その場合は、こちらの資料の4ページに記載のように、config.hを変更することで、X軸だけまたは、XY軸のみで原点復帰が完了できるようになります。詳しくはこちら(grblのFAQ)をご覧ください。
●座標モニタ(デジタルリードアウト)がつくれる
このステッピングモーターには、アバゴテクノロジー製のエンコーダモジュール(HEDS-5645)が搭載されています。データシートはこちらのサイトで公開されています。
これを利用すれば、座標モニタ(デジタルリードアウト)をつくることができます。自動で動かす時はPC画面で座標を確認できますが、手動で動かすときも座標を知りたいという場合にはとても便利です。
こちらの作品のようにマイコンを使ってデジタルリードアウトを自作するというのも面白と思います。その際には7セグメントディスプレイ 10個入りをお安くご提供していますので合わせてご検討ください。
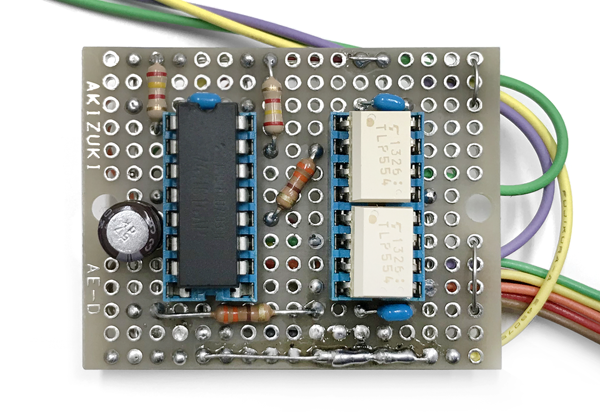
当社では手っ取り早くオムロンのカウンタ(H7CX-A11-N)を使用した座標モニタを作ってみました。リアルタイムで座標が変化するようすが下記の動画でご覧になれます。
参考までに下記に回路図を掲載します。(当社で実際に製作し正常に動作することを確認した上で掲載しています)
※パスコンは回路図の通り入れる必要があります。TLP554は高感度のアンプを内蔵しており発振を起こしやすいためです。
※ノイズについても正確な位置表示のためにはきちんと配慮してあげる必要があります。最低でもエンコーダーとモータのケーブルは分離させたほうがよいです。


オムロンのカウンタは下記のように設定しました。
・NPN/PNP入力モード(DIPスイッチ):NPN
・入力モード:UP/DOWN C (位相差入力)
・計数速度:5kHz
・プリスケール:0.025(エンコーダーの分解能が400p/r、ボールネジのリードが10mmなので、 10mm÷400p/r=0.025)
・小数点位置(dP):----.--
●アルミハンドルやダンパを取り付けることができる
このステッピングモータは、両軸タイプではありますが、片側が丸シャフトではなくギヤになっています。このためプーリーなどは取り付けることができませんが、ハンドルやダンパなら問題ありません。
下記のアルミハンドルを装着することができます。
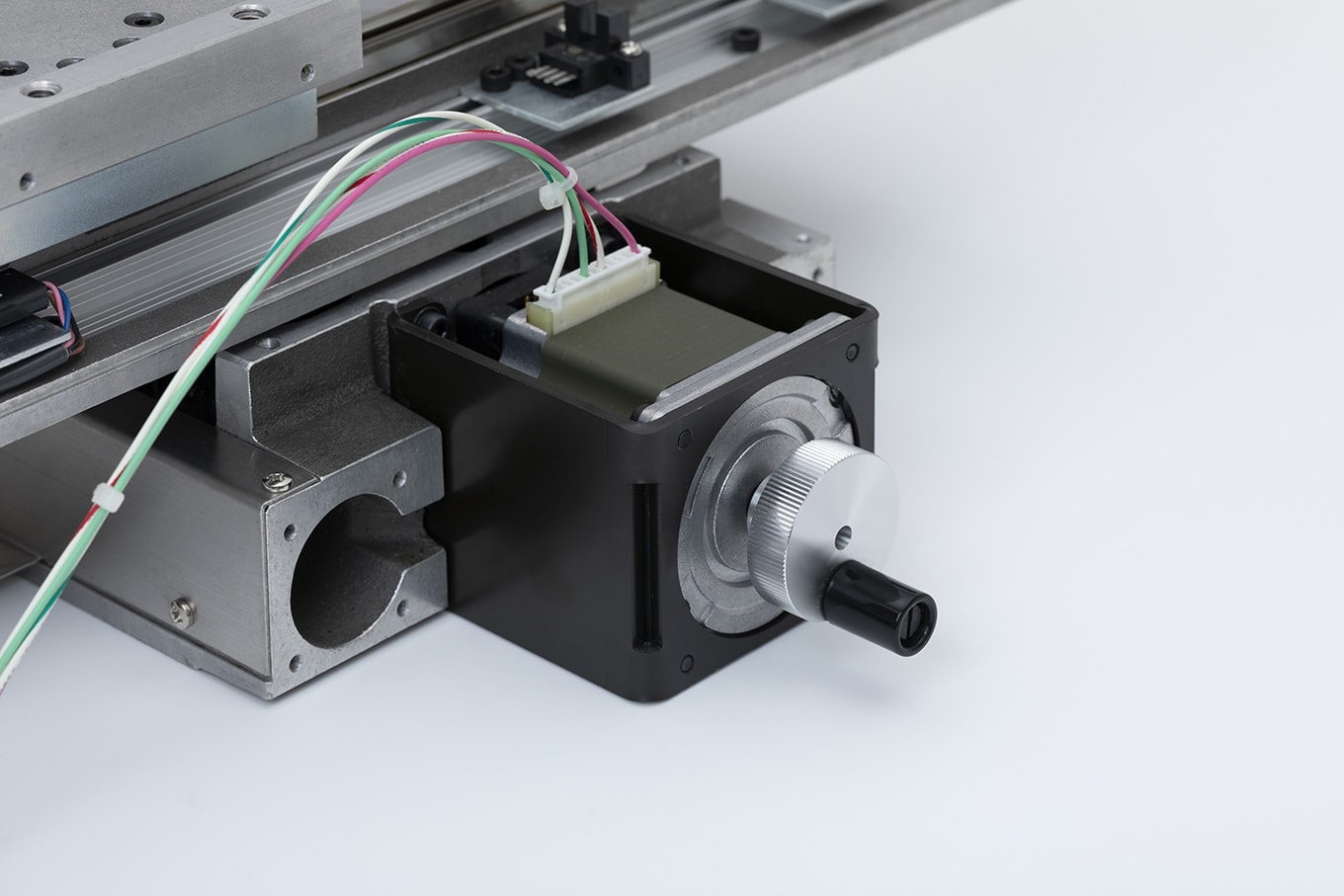
▲アルミハンドル(穴径Φ5 商品コード:131097が適用可能です)
また、振動を吸収するためのダンパも取り付け可能です。

▲オリエンタルモーター クリーンダンパ D4CL-5.0
●商品の状態
わずかに汚れやキズがありますが、精度は保たれています。
ステッピングモータ用ケーブル、リミットセンサ用ケーブルを付属します。
ArduinoやCNCシールド基板は付属しません。
・Arduino+CNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版(v1.1)のGrblをアップロードしています。
このページでは大まかな説明のみとなっておりますので、より詳しい内容は、「Arduinoでメカトロニクス製品を動かそう」をご覧ください。
●接続例
Arduinoで動かすには、コネクタを下記の図を参照してCNCシールドに差し込んでください。(CNCシールドのコネクタがピンヘッダのため誤挿入を防止することができません。差し込み箇所を間違えないようご注意をお願いします。)
※本製品に装着されているセンサの電源電圧はDC5〜24Vです。24Vで動作させる場合には回路図の通り、茶色の線をCNCシールドの電源端子の+に接続します。5Vで動作させる場合には、CNCシールドの5V端子に接続してください。
●設定例
下記は本製品を使う場合のArduinoの設定例です。モーターとセンサを先ほどの図の通りに差し込んで頂いた上で、下記の通りに設定しますと、実際のアクチュエータの移動量とgrblに表示される移動量が一致しますし、原点復帰も可能となります。
重要な設定項目のみご説明します。
$5 (リミット入力の論理設定)=0(回路図の通りリミットセンサを配線した場合は、検出時にONしますので「0」に設定します。リミットセンサのL端子を+に接続すると論理が反転して検出時OFFとなります。この場合は「1」に設定してください。)
$100 (X軸の1mmあたりのステップ数[step/mm])=320(本製品はボールネジのピッチが20mmなので、360度÷1.8度×16÷10mm=320step/mmとなります。但しArduino基板のマイクロステップの設定は1/16としています。マイクロステップの設定のしかたについては、こちらをご覧ください。)
$110 (X軸の最高速度[mm/min])=2500(モーターの特性に合わせて最適な数値にしてあります。)
$120 (X軸の加減速度[mm/sec^2])=150(モーターの特性に合わせて最適な数値にしてあります。)
●1軸または2軸のみで原点復帰を行う場合の注意点
grblの原点復帰動作はデフォルトでZ軸→XY軸という順序で動作するようになっているため、3軸揃っていなければ完了できません。しかし、プロッタのようにZ軸が不要であったり、1軸だけで使うような用途もあると思います。その場合は、こちらの資料の4ページに記載のように、config.hを変更することで、X軸だけまたは、XY軸のみで原点復帰が完了できるようになります。詳しくはこちら(grblのFAQ)をご覧ください。
●座標モニタ(デジタルリードアウト)がつくれる
このステッピングモーターには、アバゴテクノロジー製のエンコーダモジュール(HEDS-5645)が搭載されています。データシートはこちらのサイトで公開されています。
これを利用すれば、座標モニタ(デジタルリードアウト)をつくることができます。自動で動かす時はPC画面で座標を確認できますが、手動で動かすときも座標を知りたいという場合にはとても便利です。
こちらの作品のようにマイコンを使ってデジタルリードアウトを自作するというのも面白と思います。その際には7セグメントディスプレイ 10個入りをお安くご提供していますので合わせてご検討ください。
当社では手っ取り早くオムロンのカウンタ(H7CX-A11-N)を使用した座標モニタを作ってみました。リアルタイムで座標が変化するようすが下記の動画でご覧になれます。
参考までに下記に回路図を掲載します。(当社で実際に製作し正常に動作することを確認した上で掲載しています)
※パスコンは回路図の通り入れる必要があります。TLP554は高感度のアンプを内蔵しており発振を起こしやすいためです。
※ノイズについても正確な位置表示のためにはきちんと配慮してあげる必要があります。最低でもエンコーダーとモータのケーブルは分離させたほうがよいです。
オムロンのカウンタは下記のように設定しました。
・NPN/PNP入力モード(DIPスイッチ):NPN
・入力モード:UP/DOWN C (位相差入力)
・計数速度:5kHz
・プリスケール:0.025(エンコーダーの分解能が400p/r、ボールネジのリードが10mmなので、 10mm÷400p/r=0.025)
・小数点位置(dP):----.--
●アルミハンドルやダンパを取り付けることができる
このステッピングモータは、両軸タイプではありますが、片側が丸シャフトではなくギヤになっています。このためプーリーなどは取り付けることができませんが、ハンドルやダンパなら問題ありません。
下記のアルミハンドルを装着することができます。
▲アルミハンドル(穴径Φ5 商品コード:131097が適用可能です)
また、振動を吸収するためのダンパも取り付け可能です。
▲オリエンタルモーター クリーンダンパ D4CL-5.0
●商品の状態
わずかに汚れやキズがありますが、精度は保たれています。
ステッピングモータ用ケーブル、リミットセンサ用ケーブルを付属します。
ArduinoやCNCシールド基板は付属しません。
在庫数
売り切れ