



Sold Out
神津精機 自動Z軸ステージ ZA07A-R3S
商品コード
51762
商品の概要と仕様
テーブル面:70×70mm
案内方式:精密クロスローラガイド
移動範囲:±12.5mm
送り方式:ラック&ピニオン
テーブル面:70×70mm
案内方式:精密クロスローラガイド
移動範囲:±12.5mm
送り方式:ラック&ピニオン
分解能:0.25μm/step(Half時)
最高速度:2.5mm/sec
繰返し位置決め精度:±0.5μm以内
ロストモーション:3μm以内
水平耐荷重:10kg
材質:アルミ合金
外観:白色仕上げ
自重:2.2kg
使用モータ:PX535MH-B
定価:240,000円
コンパクトなボディの中に、CWリミット、CCWリミット、原点の計3つのセンサが内蔵されています。
手回し用のハンドルは付いていませんが、モーターが両軸タイプですので、お客様にてボリュームツマミのようなものを取り付けて回すといったこともできると思います。
詳細はメーカーの製品ページをご覧ください。
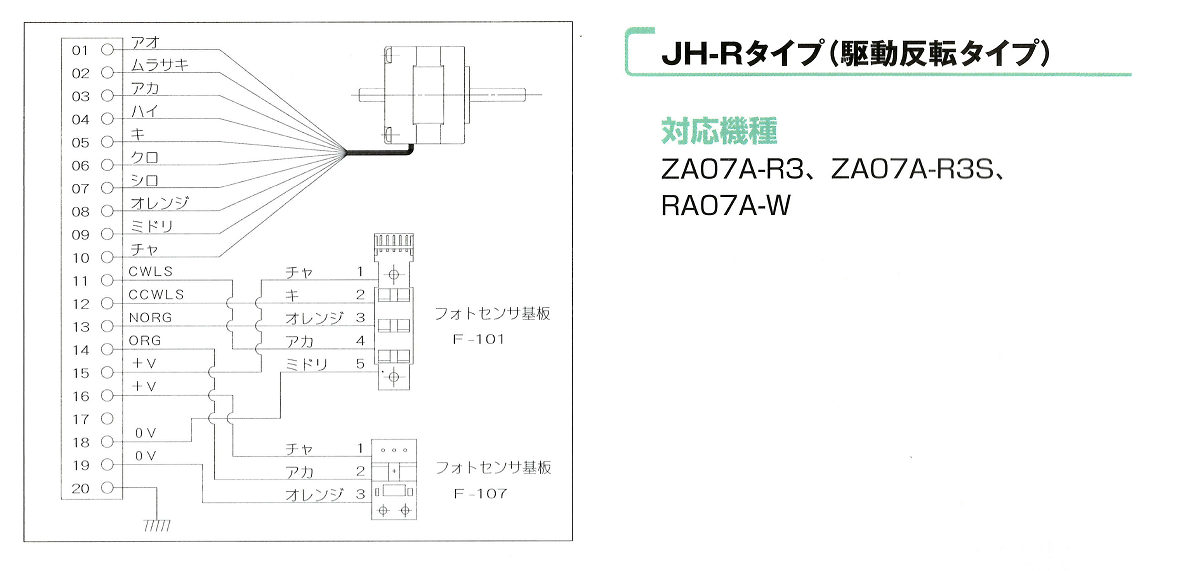
内部結線図に関しましてはこちらの資料をご覧ください。
ドライバは付属しませんが、組み合わせ可能なドライバをご用意しております。あわせてご検討ください。
・メレック 5相ステッピングモータドライバ DB-5410
・オリエンタルモーター 5相ステッピングモータードライバ SD5107P3
・オリエンタルモーター 5相ステッピングモータードライバ UDK5107NW2
・オリエンタルモーター 5相ステッピングモータードライバ RKD507-A
・オリエンタルモーター 5相ステッピングモータードライバ UDX5107N
ドライバを付属したタイプもご用意しております。あわせてご検討ください。
・神津精機 ステッピングモーター付きZ軸ステージとドライバのセット ZA07A-R3S+RKD507-A
案内方式:精密クロスローラガイド
移動範囲:±12.5mm
送り方式:ラック&ピニオン
テーブル面:70×70mm
案内方式:精密クロスローラガイド
移動範囲:±12.5mm
送り方式:ラック&ピニオン
分解能:0.25μm/step(Half時)
最高速度:2.5mm/sec
繰返し位置決め精度:±0.5μm以内
ロストモーション:3μm以内
水平耐荷重:10kg
材質:アルミ合金
外観:白色仕上げ
自重:2.2kg
使用モータ:PX535MH-B
定価:240,000円
コンパクトなボディの中に、CWリミット、CCWリミット、原点の計3つのセンサが内蔵されています。
手回し用のハンドルは付いていませんが、モーターが両軸タイプですので、お客様にてボリュームツマミのようなものを取り付けて回すといったこともできると思います。
詳細はメーカーの製品ページをご覧ください。
内部結線図に関しましてはこちらの資料をご覧ください。
{kind=link}
ドライバは付属しませんが、組み合わせ可能なドライバをご用意しております。あわせてご検討ください。
・メレック 5相ステッピングモータドライバ DB-5410
・オリエンタルモーター 5相ステッピングモータードライバ SD5107P3
・オリエンタルモーター 5相ステッピングモータードライバ UDK5107NW2
・オリエンタルモーター 5相ステッピングモータードライバ RKD507-A
・オリエンタルモーター 5相ステッピングモータードライバ UDX5107N
ドライバを付属したタイプもご用意しております。あわせてご検討ください。
・神津精機 ステッピングモーター付きZ軸ステージとドライバのセット ZA07A-R3S+RKD507-A
商品の状態
●接続例
下記の図の一番上の回路は、コントローラにArduino+CNCシールド(Amazonで現時点で2,630円)、ドライバにRKD507-Aを使用しています。「Arduinoでメカトロニクス製品を動かそう」では、Arduinoで動かす場合の詳細なご説明をしています。ぜひご覧ください。
中央の回路は、コントローラにSG8030J、ドライバにRKD507-Aを使用しています。SG8030Jは、スイッチを押している間だけ運転させたり、あらかじめ設定したデータを外部信号で選択して位置決め運転させるといったことが簡単にできます。この回路の場合は、スイッチを押している間だけ運転させる例です。「位置決め運転方式」の設定を「順送り位置決め(tyP-S)」にした上で、CWスキャンをONさせると、CW方向に回転、CCWスキャンをONさせると、CCW方向に回転します。
一番下の回路は、コントローラに当社のパルス変換IC、ドライバにRKD507-Aを使用しています。手動パルサ(ハンドル)に連動してステージが動くので、顕微鏡の拡大映像をモニタで確認しながら対象物の観察や検査をしたいときに便利です。手動パルサはこちら(Amazon)から購入できます。

●商品の状態
多少汚れやキズがありますが、ほとんど使用感がなく精度は保たれています。
実際にドライバ(DB-5410)に接続し、正確な位置決め運転ができること、及び、内蔵センサ(CWリミット、CCWリミット、原点の3つのセンサ)が正常に動作することを確認しています。
ドライバは付属しません。
コネクタ一式(ハウジング:RP13A-12PD-20SC71×1個、コンタクト:RP19-SC-122×20本)を付属します。
下記の図の一番上の回路は、コントローラにArduino+CNCシールド(Amazonで現時点で2,630円)、ドライバにRKD507-Aを使用しています。「Arduinoでメカトロニクス製品を動かそう」では、Arduinoで動かす場合の詳細なご説明をしています。ぜひご覧ください。
中央の回路は、コントローラにSG8030J、ドライバにRKD507-Aを使用しています。SG8030Jは、スイッチを押している間だけ運転させたり、あらかじめ設定したデータを外部信号で選択して位置決め運転させるといったことが簡単にできます。この回路の場合は、スイッチを押している間だけ運転させる例です。「位置決め運転方式」の設定を「順送り位置決め(tyP-S)」にした上で、CWスキャンをONさせると、CW方向に回転、CCWスキャンをONさせると、CCW方向に回転します。
一番下の回路は、コントローラに当社のパルス変換IC、ドライバにRKD507-Aを使用しています。手動パルサ(ハンドル)に連動してステージが動くので、顕微鏡の拡大映像をモニタで確認しながら対象物の観察や検査をしたいときに便利です。手動パルサはこちら(Amazon)から購入できます。
●商品の状態
多少汚れやキズがありますが、ほとんど使用感がなく精度は保たれています。
実際にドライバ(DB-5410)に接続し、正確な位置決め運転ができること、及び、内蔵センサ(CWリミット、CCWリミット、原点の3つのセンサ)が正常に動作することを確認しています。
ドライバは付属しません。
コネクタ一式(ハウジング:RP13A-12PD-20SC71×1個、コンタクト:RP19-SC-122×20本)を付属します。
在庫数
売り切れ