




Sold Out
▼原点復帰のようす
▼JOG運転のようす
当社にて動作確認をする際に、Arduino+CNCシールド(2018年10月時点で2,630円)を使用しました。そのケーブルを付属しますのでよかったらお使いください。差し込めばすぐに使えるようになっています。
もちろん本体およびドライバに一切の変更は加えておりませんので、Arduinoではなくシーケンサや各種マイコンなど、お客さまのコントローラで制御可能です。
以降の説明は、Arduinoで本ステージを制御する場合の説明です。ご使用の際の参考にしてください。
説明は下記を前提としています。
・ArduinoとCNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版のGrblをアップロードしています。
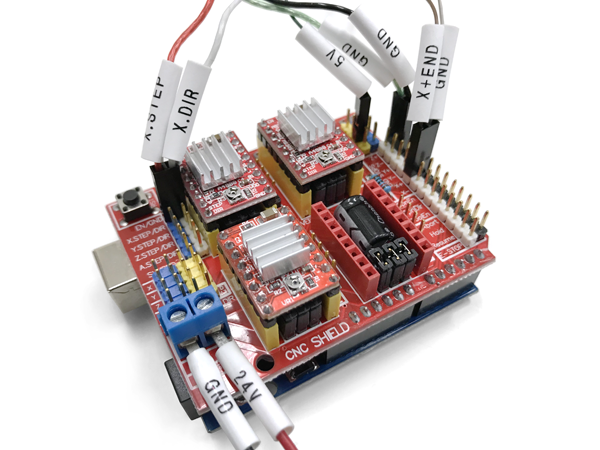
Arduinoで動かすには、コネクタを下記の写真と図を参照してCNCシールドに差し込んでください。(CNCシールドのコネクタがピンヘッダのため誤挿入を防止することができません。差し込み箇所を間違えないようご注意をお願いします。)


※各ステージには、合計で4つのフォトマイクロセンサが装着されていますが、Arduinoでは1つしか使いません。FA(工場の自動化)に使われるアクチュエーターやステージの多くは、原点復帰を開始すると、まず高速で原点方向に向かい、原点近傍(NORG)を検出したら減速させ、原点検出で停止という動作をします。そのため、このように複数のセンサが内蔵されているのですが、Grblでは、ソフトウェアの工夫により、リミットセンサ1個で同等の機能を実現しており、復帰精度も劣ることはありません。また、リミットセンサは1つしか使わなくても、もう一方はソフトリミットで代用することができます。
※ステッピングモーターの駆動には、添付のドライバ(DFU5107)を使用します。CNCシールドに搭載されているA4988ステッピングモータドライバモジュールは使用しませんので、このモジュールは引き抜いていただいて構いません(写真では搭載されたままになっています)。ドライバモジュールを使わないならば、CNCシールドは使う必要はあまりないのですが、配線がラクなのと、将来ほかの軸をドライバモジュールで駆動させる可能性がある場合は、無意味なことではないと思います。
■モーターについて
このステージに搭載されている5相ステッピングモーター(PK566-B)は、10本リード線仕様となっています。
スター配線やペンタゴン配線など、あらゆる駆動方式に対応できるため、多くの精密ステージメーカーが採用しているタイプになります。
このモーターを今回のドライバ(DFU1507)で使うには、前述の回路図のように接続します。少し複雑に見えますが、ドライバの緑色のコネクタに差し込むだけで接続できるようにしておきましたので、ご安心ください。
■原点復帰について
Arduinoでは、リミットセンサを原点センサとしても使用します。今回はCWLSをリミット兼原点センサとして使用します。ケーブルの先端にコネクタを取り付けておきましたので、先述の回路図の通りに差し込んで頂ければ原点復帰ができます。
このステージに内蔵されているセンサは「遮光OFF」になっており、センサを遮ったときOFFします。(分解してフォトマイクロセンサのL端子を開放すれば反転できます。)このため、フェールセーフ、つまり、断線や故障したときリミットが働くため安全性に優れています。
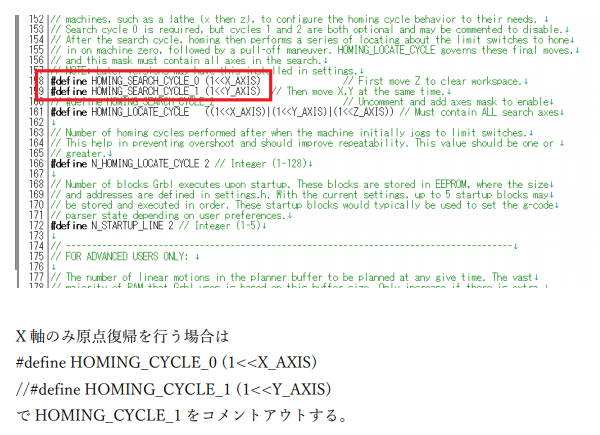
なお、Grblの原点復帰サイクルは、デフォルトでZ軸→XY軸というように動作するため、3軸揃っていなければ完了できません。しかし今回は、2軸のみで使用するため、config.hを下記のように変更し、XY軸だけで原点復帰が完了できるようにしています。詳しくはこちらをご覧ください。
■Grblの設定について
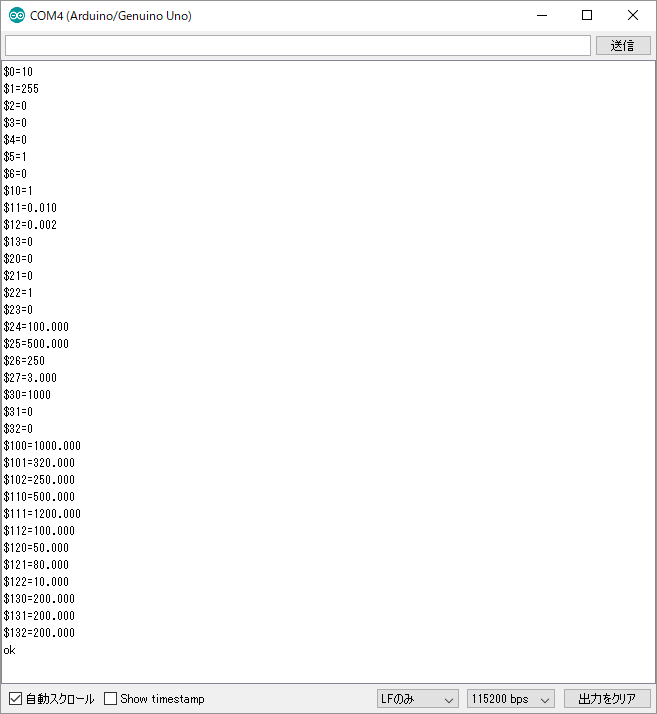
$100(1mmあたりのステップ数)の設定は、ボールネジのピッチが1mm、ステッピングモータの1周あたりのパルス数が1000なので、1mm移動するのに1000パルスが必要ということになり、$100=1000となります。
$5の設定 (limit pins invert)は1としてください。リミットセンサは遮光したときOFFするためです。
そのほかの最高速度や加減速の設定は用途に合わせて調整してください。
さきほどの動画は下記の設定値で動作させています。
■ドライバの設定について
先ほど「ステッピングモータの1周あたりのパルス数が1000」と述べましたが、それには、ドライバのDIPロータリースイッチ(DATA0、DATA1)を、1(ハーフステップ)に設定する必要があります。
一般的な5相ステッピンモータードライバは、ステップ角の設定がフルかハーフの2種類しかないのすが、このドライバは16種類ありますので、もっと分解能を細かく設定することが可能です。
また、ドライバのDIPスイッチの1P/2Pは、Arduinoに合わせて、1P(1パルス方式)に設定してあります。
RUN(運転電流)、及び、STOP(停止時電流)は、用途に合わせて調整を行ってください。

■パルス変換ICについて
顕微鏡の拡大映像をモニタで確認しながら対象物の観察や検査をしたい場合は、下記のような手動パルサを使うと感覚的に操作できて便利だと思います。
パルス変換ICはこちら、手動パルサはこちら(Amazon)で購入できます。参考までに下記に回路図も掲載します。


■商品の状態
多少使用感がありますが、精度は保たれています。
ドライバ1台、ステージ~ドライバ間のケーブル、ドライバ~Arduino間のケーブルを付属します。
ArduinoやCNCシールド基板は付属しません。
神津精機 自動位置決めステージとドライバのセット XA16-01+DFU1507
商品コード
51283
商品の概要と仕様
精密クロスローラガイドと精密ボールネジを使用し、高い位置決め精度を持った1軸ステージとドライバのセットです。
最小分解能が1μmと非常に精密で、高精度な位置決めが可能です。
▼位置決めステージ(XA16-01)
ステージ面:124×160mm
ストローク:±30mm
ボールねじの軸径:Φ10mm
ボールねじのリード:1mm
▼ドライバ(DFU-1507・オリエンタルモーター製)
電源電圧:AC100/115V
励磁方式:マイクロステップ(16段階)
参考価格:210,000円(XA16-01)
最小分解能が1μmと非常に精密で、高精度な位置決めが可能です。
▼位置決めステージ(XA16-01)
ステージ面:124×160mm
ストローク:±30mm
ボールねじの軸径:Φ10mm
ボールねじのリード:1mm
▼ドライバ(DFU-1507・オリエンタルモーター製)
電源電圧:AC100/115V
励磁方式:マイクロステップ(16段階)
参考価格:210,000円(XA16-01)
商品の状態
▼原点復帰のようす
▼JOG運転のようす
当社にて動作確認をする際に、Arduino+CNCシールド(2018年10月時点で2,630円)を使用しました。そのケーブルを付属しますのでよかったらお使いください。差し込めばすぐに使えるようになっています。
もちろん本体およびドライバに一切の変更は加えておりませんので、Arduinoではなくシーケンサや各種マイコンなど、お客さまのコントローラで制御可能です。
以降の説明は、Arduinoで本ステージを制御する場合の説明です。ご使用の際の参考にしてください。
説明は下記を前提としています。
・ArduinoとCNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版のGrblをアップロードしています。
Arduinoで動かすには、コネクタを下記の写真と図を参照してCNCシールドに差し込んでください。(CNCシールドのコネクタがピンヘッダのため誤挿入を防止することができません。差し込み箇所を間違えないようご注意をお願いします。)


※各ステージには、合計で4つのフォトマイクロセンサが装着されていますが、Arduinoでは1つしか使いません。FA(工場の自動化)に使われるアクチュエーターやステージの多くは、原点復帰を開始すると、まず高速で原点方向に向かい、原点近傍(NORG)を検出したら減速させ、原点検出で停止という動作をします。そのため、このように複数のセンサが内蔵されているのですが、Grblでは、ソフトウェアの工夫により、リミットセンサ1個で同等の機能を実現しており、復帰精度も劣ることはありません。また、リミットセンサは1つしか使わなくても、もう一方はソフトリミットで代用することができます。
※ステッピングモーターの駆動には、添付のドライバ(DFU5107)を使用します。CNCシールドに搭載されているA4988ステッピングモータドライバモジュールは使用しませんので、このモジュールは引き抜いていただいて構いません(写真では搭載されたままになっています)。ドライバモジュールを使わないならば、CNCシールドは使う必要はあまりないのですが、配線がラクなのと、将来ほかの軸をドライバモジュールで駆動させる可能性がある場合は、無意味なことではないと思います。
■モーターについて
このステージに搭載されている5相ステッピングモーター(PK566-B)は、10本リード線仕様となっています。
スター配線やペンタゴン配線など、あらゆる駆動方式に対応できるため、多くの精密ステージメーカーが採用しているタイプになります。
このモーターを今回のドライバ(DFU1507)で使うには、前述の回路図のように接続します。少し複雑に見えますが、ドライバの緑色のコネクタに差し込むだけで接続できるようにしておきましたので、ご安心ください。
■原点復帰について
Arduinoでは、リミットセンサを原点センサとしても使用します。今回はCWLSをリミット兼原点センサとして使用します。ケーブルの先端にコネクタを取り付けておきましたので、先述の回路図の通りに差し込んで頂ければ原点復帰ができます。
このステージに内蔵されているセンサは「遮光OFF」になっており、センサを遮ったときOFFします。(分解してフォトマイクロセンサのL端子を開放すれば反転できます。)このため、フェールセーフ、つまり、断線や故障したときリミットが働くため安全性に優れています。
なお、Grblの原点復帰サイクルは、デフォルトでZ軸→XY軸というように動作するため、3軸揃っていなければ完了できません。しかし今回は、2軸のみで使用するため、config.hを下記のように変更し、XY軸だけで原点復帰が完了できるようにしています。詳しくはこちらをご覧ください。
■Grblの設定について
$100(1mmあたりのステップ数)の設定は、ボールネジのピッチが1mm、ステッピングモータの1周あたりのパルス数が1000なので、1mm移動するのに1000パルスが必要ということになり、$100=1000となります。
$5の設定 (limit pins invert)は1としてください。リミットセンサは遮光したときOFFするためです。
そのほかの最高速度や加減速の設定は用途に合わせて調整してください。
さきほどの動画は下記の設定値で動作させています。
■ドライバの設定について
先ほど「ステッピングモータの1周あたりのパルス数が1000」と述べましたが、それには、ドライバのDIPロータリースイッチ(DATA0、DATA1)を、1(ハーフステップ)に設定する必要があります。
一般的な5相ステッピンモータードライバは、ステップ角の設定がフルかハーフの2種類しかないのすが、このドライバは16種類ありますので、もっと分解能を細かく設定することが可能です。
また、ドライバのDIPスイッチの1P/2Pは、Arduinoに合わせて、1P(1パルス方式)に設定してあります。
RUN(運転電流)、及び、STOP(停止時電流)は、用途に合わせて調整を行ってください。
■パルス変換ICについて
顕微鏡の拡大映像をモニタで確認しながら対象物の観察や検査をしたい場合は、下記のような手動パルサを使うと感覚的に操作できて便利だと思います。
パルス変換ICはこちら、手動パルサはこちら(Amazon)で購入できます。参考までに下記に回路図も掲載します。
■商品の状態
多少使用感がありますが、精度は保たれています。
ドライバ1台、ステージ~ドライバ間のケーブル、ドライバ~Arduino間のケーブルを付属します。
ArduinoやCNCシールド基板は付属しません。
在庫数
売り切れ