




Sold Out
Arduinoで動く精密XYステージ 駿河精機 KS102-70R-1-K
商品コード
51251
商品の概要と仕様
Arduinoで動くXYステージ(駿河精機の精密ステージを2台組み合わせたXYステージ)と、ドライバのセットです。
移動量[mm]:70
ステージ面サイズ[mm]:80×130
送りねじ:Φ8リード1
ガイド:クロスローラガイド
自重[kg]:1.8
ドライバ:DFC5107P
分解能:Full(パルス)[μm]:1
分解能:Half(パルス)[μm]:0.5
※上記内容はXY軸共通です。
移動量[mm]:70
ステージ面サイズ[mm]:80×130
送りねじ:Φ8リード1
ガイド:クロスローラガイド
自重[kg]:1.8
ドライバ:DFC5107P
分解能:Full(パルス)[μm]:1
分解能:Half(パルス)[μm]:0.5
※上記内容はXY軸共通です。
テスト運転
原点復帰
商品の状態
ステージ本体、センサ、ドライバが正常に動作することを確認しました。テスト運転のようすが動画でご確認いただけます。このページのいちばん下をご覧ください。
タイトルに「Arduinoで動く」と入れましたのは、当社にて、ステージとドライバからのケーブルの先端にコネクタを取り付けて、Arduino+CNCシールド(2018年10月時点で2,630円)に差し込めばすぐに使えるようにしてあるためです。
もちろん本体および内部回路に一切の変更は加えておりませんので、Arduinoでなくシーケンサや各種マイコンなど、お客さまのコントローラで制御可能です。
以降の説明は、下記を前提としています。
・ArduinoとCNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版のGrblをアップロードしています。
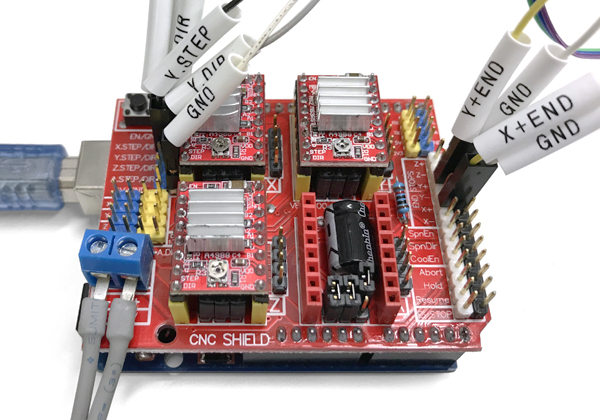
Arduinoで動かすには、コネクタを下記の写真と図を参照してCNCシールドに差し込んでください。(CNCシールドのコネクタがピンヘッダのため誤挿入を防止することができません。差し込み箇所を間違えないようご注意をお願いします。)



※各ステージには、4つのフォトマイクロセンサが内蔵されていますが、今回は1つしか使いません。FA(工場の自動化)に使われるアクチュエーターやステージの多くは、原点復帰を開始すると、まず高速で原点方向に向かい、原点近傍(NORG)を検出したら減速させ、原点検出で停止という動作をします。そのため、このように複数のセンサが内蔵されているのですが、Grblでは、ソフトウェアの工夫により、リミットセンサ1個で同等の機能を実現しており、復帰精度も劣ることはありません。また、リミットセンサは1つしか使わなくても、もう一方はソフトリミットで代用することができます。
※ステージのコネクタから出ている灰色の線(10番ピン)は、必ず24Vに接続してください。この線は内部のフォトマイクロセンサの(+)に繋がっています。内部のフォトマイクロセンサは5Vでも動作しますが、1軸あたりに4つ、合計で8つもセンサがあると消費電流が大きくなり、USBポートからの電力供給では賄いきれない可能性があります。そうなると正常に原点復帰ができません。このため必ず24Vに接続してください。Arduinoだけでしか動かさないという場合は、分解して使わないセンサを取り外してしまえば消費電流が少なくなるので5Vでもよいと思います。
※2軸のうちどちらをX軸にするかY軸にするかは自由に決められます。もし、下側の軸をX軸にしたいならば、下側の軸のドライバやセンサのケーブルをCNCシールド基板のX側に差し込むだけです。
※ステッピングモーターの駆動には、専用のドライバ(DFC5107P)を使用します。このため、CNCシールドに搭載されているA4988ステッピングモータドライバモジュールは使用しません。したがって、このモジュールは引き抜いていただいて構いません(写真では搭載されたままになっています)。ドライバモジュールを使わないならば、CNCシールドは使う必要はあまりないのですが、配線がラクなのと、将来Z軸を増設したときにドライバモジュールで駆動させることも可能ですので、無意味なことではないと思います。
■原点復帰について
Arduinoでは、リミットセンサを原点センサとしても使用します。今回はCWLSをリミット兼原点センサとして使用します。ケーブルの先端にコネクタを取り付けておきましたので、先述の回路図の通りに差し込んで頂ければ原点復帰ができます。
原点復帰のようすを動画に収めました。このページのいちばん下でご覧になれます。
このステージに内蔵されているセンサは「遮光OFF」になっており、センサを遮ったときOFFします。(分解してフォトマイクロセンサのL端子を開放すれば反転できます。)このため、フェールセーフ、つまり、断線や故障したときリミットが働くため安全性に優れています。ただし、CWLSリミットだけでなく、もう一方のCCWSリミットも使いたいという場合には注意が必要です。下記の「参考までに」をご覧ください。
フォトマイクロセンサ(EE-SX673)についての詳細はメーカーのページをご覧ください。
~参考までに~
CNCシールドのリミット入力は、「X+」、「X-」というように、1軸に対して2つのリミットを接続できるようになっています。しかし回路をよく確認してみると、実はその二つは同じポートに接続されていて、独立していません。つまり、CPUから見ると、+側のリミットが働いたのか、-側のリミットが働いたのかを判別できないのです。おそらくポートの節約のためにこうしてあるのでしょう。
このためソフトウェアにて、+方向に動いているときにリミットが働いたら+リミットと判断し、-方向に動いているときにリミットが働いたら-リミットとして判断しているはずです。 ただ、この方法だと困ったことが起きます。それは、フォトマイクロセンサが2個で、かつ、遮光OFFで使いたい時です。(一般的に工場では安全を確保するためにフェールセーフ、つまり、断線や故障したときに安全側に働くようにするので、遮光OFFで使うことがほとんどです。つまり今回のフォトマイクロセンサで言えば、L端子を+に接続して使います。)
リミットスイッチがマイクロスイッチなどの接点であればAND接続(直列)にすればよいだけなので簡単ですが、FA製品の多くは、フォトマイクロセンサが使われています。フォトマイクロセンサはこちらの記事にも書かれているように、AND接続はできません。
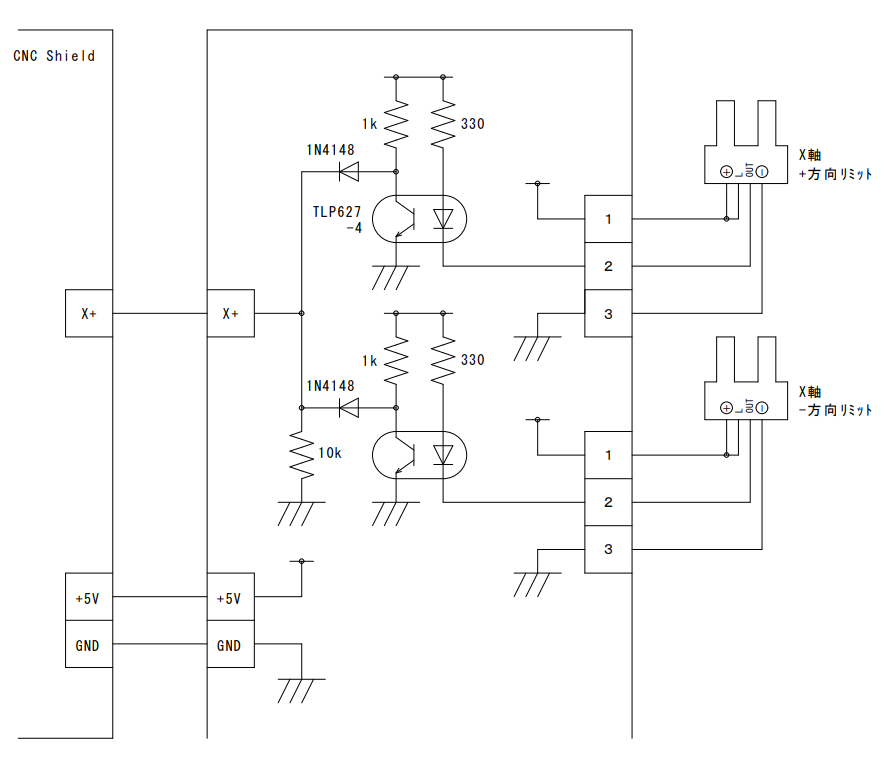
これを実現するには、参考までに下記のような回路を作るとよいと思います。(この回路は当社で実験し正常に動作することを確認した上で掲載していますのでご安心ください)
この回路を使用するときは、Gbrlの設定の$5(limit pins invert)を1に変更にする必要があります。

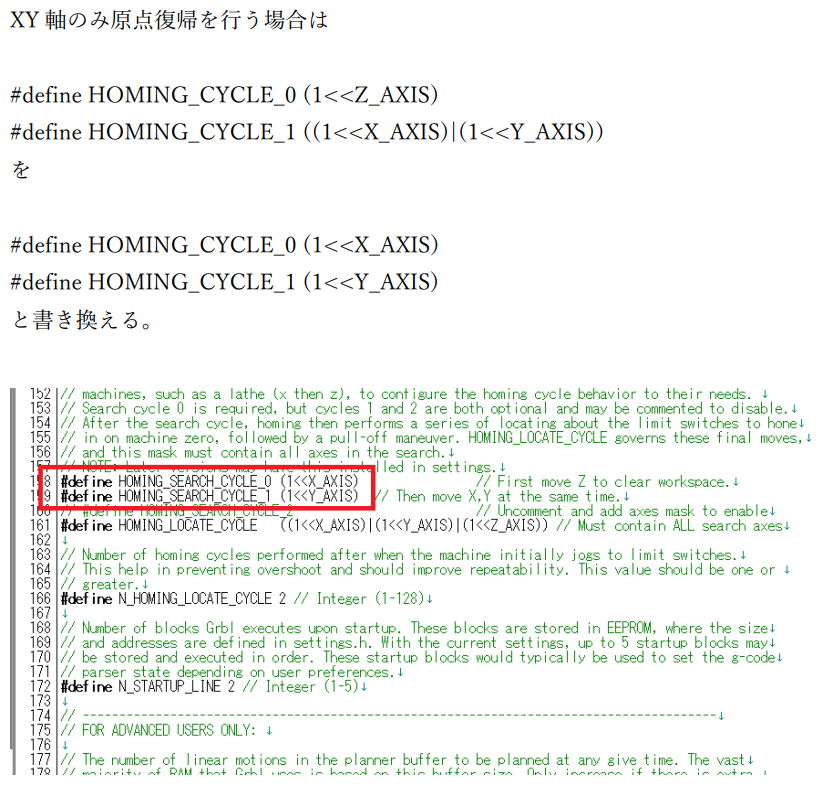
なお、原点復帰は、デフォルトでZ軸→XY軸というように動作するため、3軸揃っていなければ完了できません。しかし今回は、2軸のみで使用するため、config.hを下記のように変更し、XY軸だけで原点復帰が完了できるようにしています。詳しくはこちらをご覧ください。
■Grblの設定について
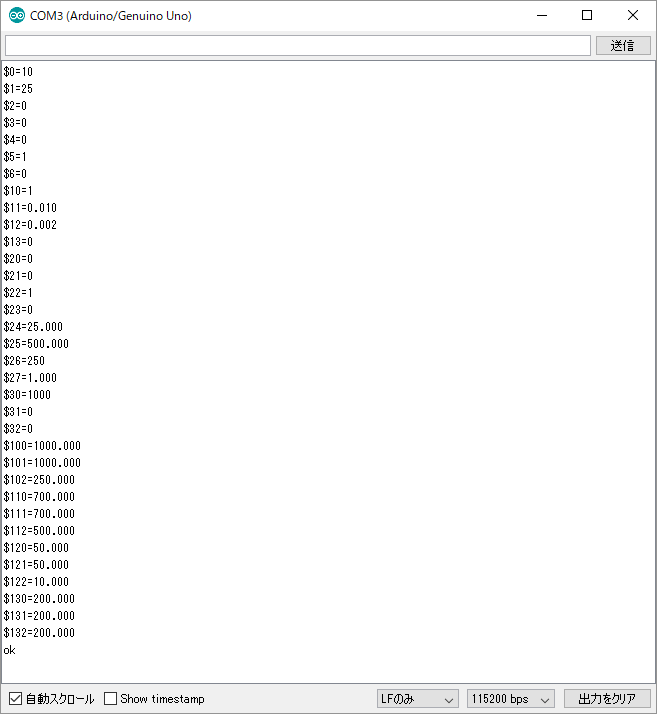
$100(1mmあたりのステップ数)の設定は、ボールネジのピッチが1mm、ステッピングモータの1周あたりのパルス数が1000なので、1mm移動するのに1000パルスが必要ということになり、$100=1000となります。
$5の設定 (limit pins invert)は1としてください。リミットセンサは遮光したときOFFするためです。
そのほかの最高速度や加減速の設定は用途に合わせて調整してください。
実際に下記の設定値で動作させたところを動画に収めました。このページの下のほうでご覧になれます。
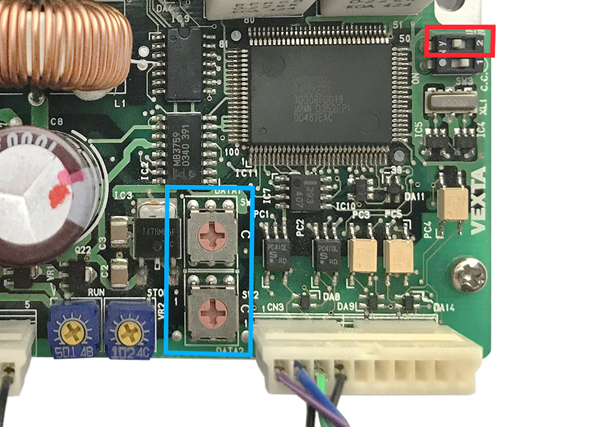
■ドライバの設定について
先ほど「ステッピングモータの1周あたりのパルス数が1000」と述べましたが、それには、ドライバのDIPロータリースイッチ(写真の青枠)を、0(フルステップ)に設定する必要があります。
一般的に5相ステッピングモーターの基本ステップ角は0.72度ですが、このステージに使われているモーターは0.36度となっております。このため、一般的なモーターなら、1(ハーフステップ)にしないと1周あたりのパルス数は1000になりませんが、今回の場合は0(フルステップ)で1周あたりのパルス数が1000となります。
また、ドライバのDIPスイッチ(写真の赤枠)の2番は、Arduinoに合わせて、ON(1パルス方式)に設定してあります。
ドライバについての詳細はこちらの取扱説明書(PDF)をご覧ください。
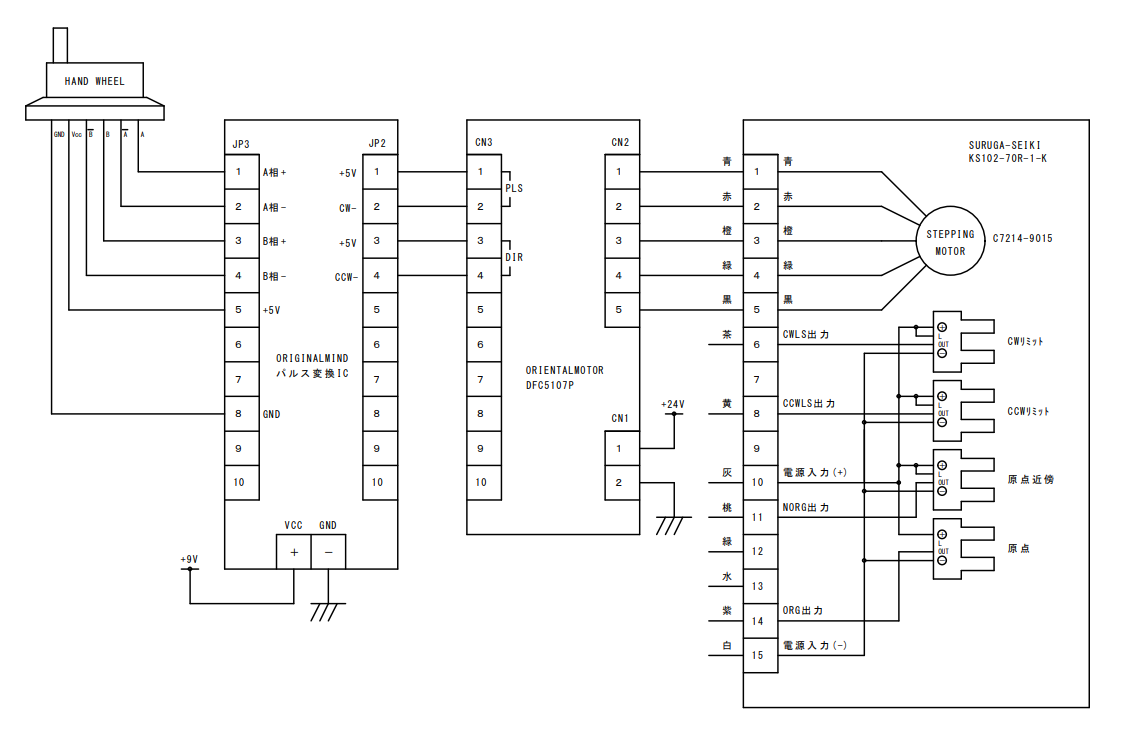
■パルス変換ICについて
顕微鏡の拡大映像をモニタで確認しながら対象物の観察や検査をしたい場合は、下記のような手動パルサを使うと感覚的に操作できて便利だと思います。
パルス変換ICはこちら、手動パルサはこちら(Amazon)で購入できます。参考までに下記に回路図も掲載します。
※1軸分の回路図しかありませんが、もう1軸も全く同じ回路になります。

■電源について
24Vの電源については下記をおすすめします。容量は余裕があったほうがいいです。
・キーエンス スイッチングパワーサプライ MS2-H150 (今回の動作確認ではこれを使いました。)
・TDKラムダ スイッチング電源 ZWS150PAF-24/J
■商品の状態
多少使用感がありますが、精度は保たれています。
ドライバ2台、ステージ~ドライバ間のケーブル、ドライバ~Arduino間のケーブルを付属します。(長さが短いため必要に応じて延長してください)
ArduinoやCNCシールド基板は付属しません。
タイトルに「Arduinoで動く」と入れましたのは、当社にて、ステージとドライバからのケーブルの先端にコネクタを取り付けて、Arduino+CNCシールド(2018年10月時点で2,630円)に差し込めばすぐに使えるようにしてあるためです。
もちろん本体および内部回路に一切の変更は加えておりませんので、Arduinoでなくシーケンサや各種マイコンなど、お客さまのコントローラで制御可能です。
以降の説明は、下記を前提としています。
・ArduinoとCNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版のGrblをアップロードしています。
Arduinoで動かすには、コネクタを下記の写真と図を参照してCNCシールドに差し込んでください。(CNCシールドのコネクタがピンヘッダのため誤挿入を防止することができません。差し込み箇所を間違えないようご注意をお願いします。)
※各ステージには、4つのフォトマイクロセンサが内蔵されていますが、今回は1つしか使いません。FA(工場の自動化)に使われるアクチュエーターやステージの多くは、原点復帰を開始すると、まず高速で原点方向に向かい、原点近傍(NORG)を検出したら減速させ、原点検出で停止という動作をします。そのため、このように複数のセンサが内蔵されているのですが、Grblでは、ソフトウェアの工夫により、リミットセンサ1個で同等の機能を実現しており、復帰精度も劣ることはありません。また、リミットセンサは1つしか使わなくても、もう一方はソフトリミットで代用することができます。
※ステージのコネクタから出ている灰色の線(10番ピン)は、必ず24Vに接続してください。この線は内部のフォトマイクロセンサの(+)に繋がっています。内部のフォトマイクロセンサは5Vでも動作しますが、1軸あたりに4つ、合計で8つもセンサがあると消費電流が大きくなり、USBポートからの電力供給では賄いきれない可能性があります。そうなると正常に原点復帰ができません。このため必ず24Vに接続してください。Arduinoだけでしか動かさないという場合は、分解して使わないセンサを取り外してしまえば消費電流が少なくなるので5Vでもよいと思います。
※2軸のうちどちらをX軸にするかY軸にするかは自由に決められます。もし、下側の軸をX軸にしたいならば、下側の軸のドライバやセンサのケーブルをCNCシールド基板のX側に差し込むだけです。
※ステッピングモーターの駆動には、専用のドライバ(DFC5107P)を使用します。このため、CNCシールドに搭載されているA4988ステッピングモータドライバモジュールは使用しません。したがって、このモジュールは引き抜いていただいて構いません(写真では搭載されたままになっています)。ドライバモジュールを使わないならば、CNCシールドは使う必要はあまりないのですが、配線がラクなのと、将来Z軸を増設したときにドライバモジュールで駆動させることも可能ですので、無意味なことではないと思います。
■原点復帰について
Arduinoでは、リミットセンサを原点センサとしても使用します。今回はCWLSをリミット兼原点センサとして使用します。ケーブルの先端にコネクタを取り付けておきましたので、先述の回路図の通りに差し込んで頂ければ原点復帰ができます。
原点復帰のようすを動画に収めました。このページのいちばん下でご覧になれます。
このステージに内蔵されているセンサは「遮光OFF」になっており、センサを遮ったときOFFします。(分解してフォトマイクロセンサのL端子を開放すれば反転できます。)このため、フェールセーフ、つまり、断線や故障したときリミットが働くため安全性に優れています。ただし、CWLSリミットだけでなく、もう一方のCCWSリミットも使いたいという場合には注意が必要です。下記の「参考までに」をご覧ください。
フォトマイクロセンサ(EE-SX673)についての詳細はメーカーのページをご覧ください。
~参考までに~
CNCシールドのリミット入力は、「X+」、「X-」というように、1軸に対して2つのリミットを接続できるようになっています。しかし回路をよく確認してみると、実はその二つは同じポートに接続されていて、独立していません。つまり、CPUから見ると、+側のリミットが働いたのか、-側のリミットが働いたのかを判別できないのです。おそらくポートの節約のためにこうしてあるのでしょう。
このためソフトウェアにて、+方向に動いているときにリミットが働いたら+リミットと判断し、-方向に動いているときにリミットが働いたら-リミットとして判断しているはずです。 ただ、この方法だと困ったことが起きます。それは、フォトマイクロセンサが2個で、かつ、遮光OFFで使いたい時です。(一般的に工場では安全を確保するためにフェールセーフ、つまり、断線や故障したときに安全側に働くようにするので、遮光OFFで使うことがほとんどです。つまり今回のフォトマイクロセンサで言えば、L端子を+に接続して使います。)
リミットスイッチがマイクロスイッチなどの接点であればAND接続(直列)にすればよいだけなので簡単ですが、FA製品の多くは、フォトマイクロセンサが使われています。フォトマイクロセンサはこちらの記事にも書かれているように、AND接続はできません。
これを実現するには、参考までに下記のような回路を作るとよいと思います。(この回路は当社で実験し正常に動作することを確認した上で掲載していますのでご安心ください)
この回路を使用するときは、Gbrlの設定の$5(limit pins invert)を1に変更にする必要があります。
なお、原点復帰は、デフォルトでZ軸→XY軸というように動作するため、3軸揃っていなければ完了できません。しかし今回は、2軸のみで使用するため、config.hを下記のように変更し、XY軸だけで原点復帰が完了できるようにしています。詳しくはこちらをご覧ください。
■Grblの設定について
$100(1mmあたりのステップ数)の設定は、ボールネジのピッチが1mm、ステッピングモータの1周あたりのパルス数が1000なので、1mm移動するのに1000パルスが必要ということになり、$100=1000となります。
$5の設定 (limit pins invert)は1としてください。リミットセンサは遮光したときOFFするためです。
そのほかの最高速度や加減速の設定は用途に合わせて調整してください。
実際に下記の設定値で動作させたところを動画に収めました。このページの下のほうでご覧になれます。
■ドライバの設定について
先ほど「ステッピングモータの1周あたりのパルス数が1000」と述べましたが、それには、ドライバのDIPロータリースイッチ(写真の青枠)を、0(フルステップ)に設定する必要があります。
一般的に5相ステッピングモーターの基本ステップ角は0.72度ですが、このステージに使われているモーターは0.36度となっております。このため、一般的なモーターなら、1(ハーフステップ)にしないと1周あたりのパルス数は1000になりませんが、今回の場合は0(フルステップ)で1周あたりのパルス数が1000となります。
また、ドライバのDIPスイッチ(写真の赤枠)の2番は、Arduinoに合わせて、ON(1パルス方式)に設定してあります。
ドライバについての詳細はこちらの取扱説明書(PDF)をご覧ください。
■パルス変換ICについて
顕微鏡の拡大映像をモニタで確認しながら対象物の観察や検査をしたい場合は、下記のような手動パルサを使うと感覚的に操作できて便利だと思います。
パルス変換ICはこちら、手動パルサはこちら(Amazon)で購入できます。参考までに下記に回路図も掲載します。
※1軸分の回路図しかありませんが、もう1軸も全く同じ回路になります。
■電源について
24Vの電源については下記をおすすめします。容量は余裕があったほうがいいです。
・キーエンス スイッチングパワーサプライ MS2-H150 (今回の動作確認ではこれを使いました。)
・TDKラムダ スイッチング電源 ZWS150PAF-24/J
■商品の状態
多少使用感がありますが、精度は保たれています。
ドライバ2台、ステージ~ドライバ間のケーブル、ドライバ~Arduino間のケーブルを付属します。(長さが短いため必要に応じて延長してください)
ArduinoやCNCシールド基板は付属しません。
在庫数
売り切れ