



Sold Out
電動スライダが正常に動作することを確認しました。この動画はそのテスト運転のようすです。上の動画はLerdge-X、下の動画はArduino で動かしています。
この電動スライダは本来、専用のコントローラーに接続して使うものですが、動力は2相ステッピングモーターになっておりますので、Lerdge-X(3Dプリンタコントロールボード)や、Arduino(Grbl)での制御が可能です。本体には一切の変更は加えておりませんので、もちろん専用コントローラーでの制御も可能です。(専用コントローラーは付属しません)。
ところで、Lerdge-XやArduinoで電動スライダを制御できるなんて、すごくワクワクしませんか?
本来の使い方とは違う方法ではありますが、ものづくりの楽しさってこういうところにもある気がします。なので今回はLerdge-XやArduinoに接続して使う例をご紹介します。
以降の説明は、下記を前提としています。
・ArduinoとCNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版のGrblをアップロードしています。
・Lerdge-X(3Dプリンタコントロールボード)はこちら(AliExpress)から購入したものを使用しています。
・Lerdge-Xのメーカーサイトはこちらです。
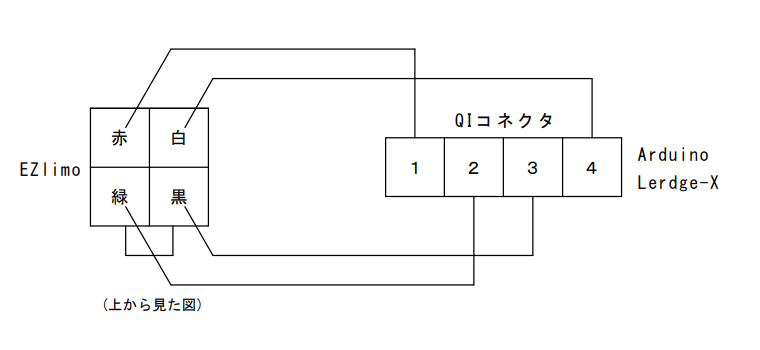
■配線について
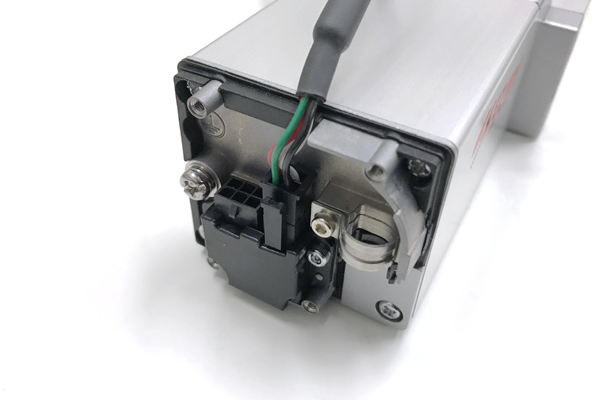
この電動スライダの後部のカバーを外すと2つのコネクタがあり、ひとつは内部のモーターに、もうひとつはそのモーターに直結のエンコーダーに接続されています。今回はその2つのコネクタのうち、モーター側しか使いません。(専用コントローラーを使う場合はエンコーダー側も当然使います。)
このため配線はとてもシンプルです。当社で動作確認に使ったケーブルを付属しますので、よろしければお使いください。コネクタに差し込むだけで使えるようになっています。もしエンコーダーのほうも使いたいというお客様は、コネクタ(6P)を付属しますので、よろしければお使いください。この電動スライダにはアブソリュートエンコーダーが搭載されておりますので、活用してみるのも面白いと思います。)
■原点復帰について
専用コントローラーによる原点復帰は、「押し当て方式」といって、メカエンドに押し当てて反転し原点を確定する方式を取っています。GrblやLerdge-Xの原点復帰方法とは異なるため、それらで原点復帰を行うには、別途原点センサ(リミットセンサ)を設置していただく必要があります。
また、Grblの場合は、config.hを書き換えることにより、X軸またはXY軸だけで使用する場合も原点復帰ができますが、Lerdge-Xの場合はXYZの3軸が揃っていないと実行できません。(もしかしたらできるのかも知れませんが、その方法はわかりませんでした)
■ドライバ(A4988)の設定について(Lerdge-XやArduinoにA4988のドライバモジュールを搭載している場合)
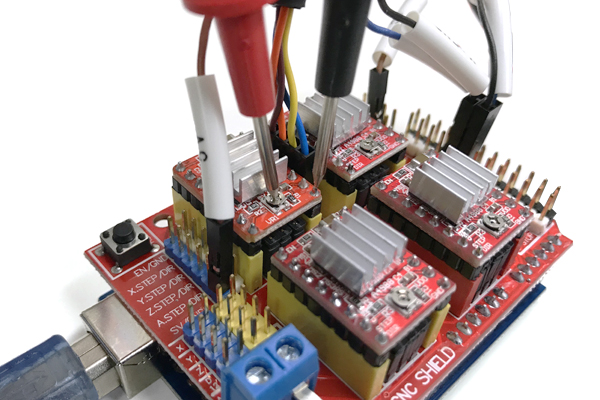
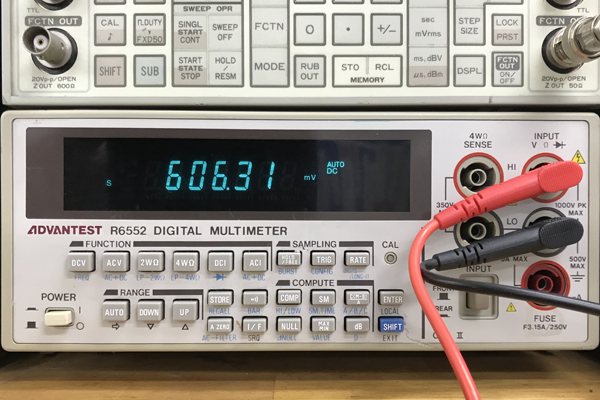
A4988には、モータに電流が流れ過ぎないよう電流を制限する機能が搭載されています。その電流値は、下記の写真のようにドライバ基板上のボリュームを回しながら、ボリュームとGND間の電圧(VREF)を調整することで設定します。下記はその電圧(VREF)を算出するための計算式です。
Imax=Vref/0.4
この電動シリンダに装着されているステッピングモータは、正確な定格電流がわからなかったのですが、当社ではImaxを1.5Aとして設定してみました。この計算式にあてめると、VREFが0.6Vになります。ボリュームとGND間の電圧が0.6Vになるよう調整を行ってください。
なお、運転の頻度によって異なりますが、A4988の発熱が大きくなり、CNCシールドに付属のヒートシンクでは不十分になる可能性があります。その場合はヒートシンクを大きくするか、電流値を下げてご使用ください。
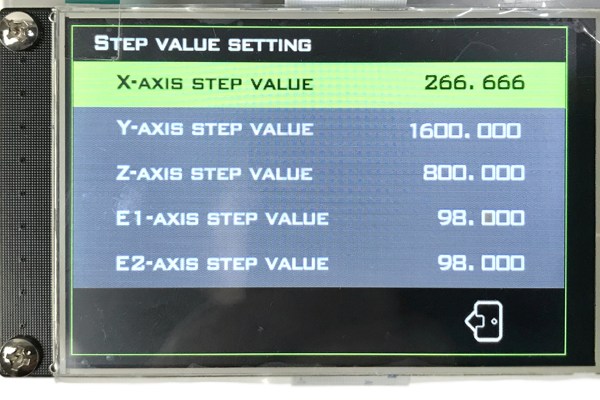
■Grbl、lerdge-Xの設定について
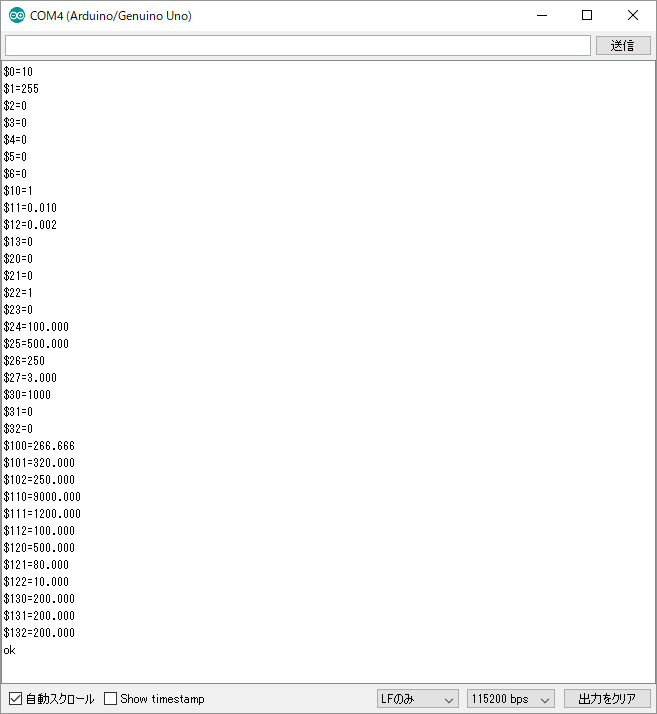
下記はArduinoで動かす場合のGrblの設定です。
$100(1mmあたりのステップ数)は、マイクロステップの設定が1/16、本体のボールネジのピッチが12mmなので、360度÷1.8度×16÷12mm=266.666pls/mmとなります。
$1は、次の動作に移るまでの停留時間ですが、255に設定すると停止時にもモータに電流を流し位置を保持します。電動シリンダは停止時にも位置を保持したいことが多いと思い255にしましたが、モーターもドライバモジュールも発熱も大きくなってしまいますので、用途にあわせて設定を変更してください。
そのほかの最高速度や加減速の設定は用途に合わせて調整してください。
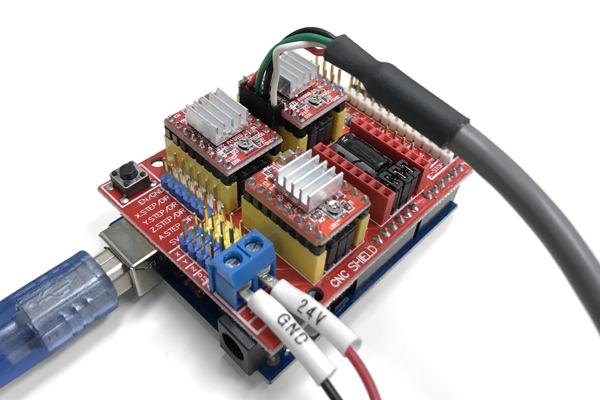
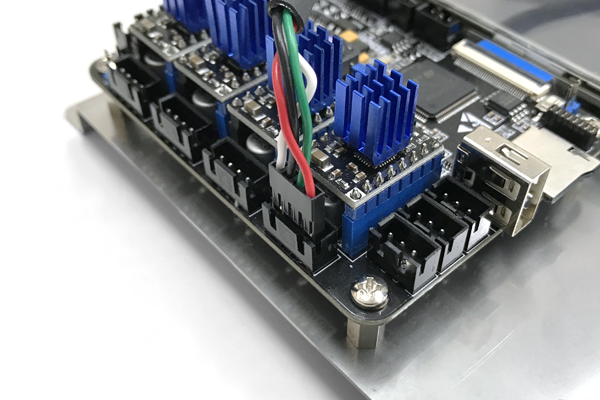
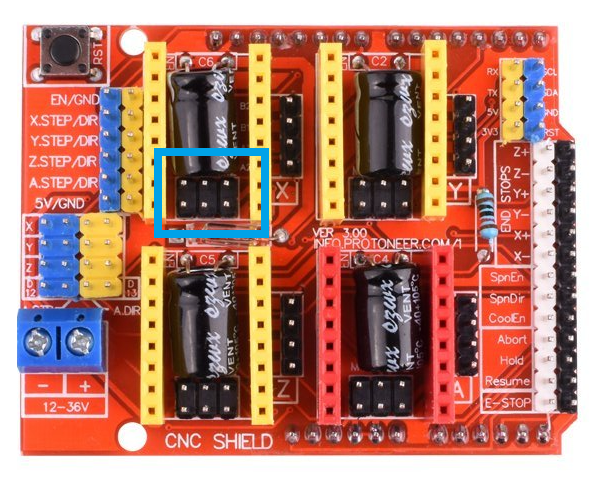
先ほど「マイクロステップの設定が1/16」と書きましたが、CNCシールドの下記の青い枠のところにショートピンを3つ接続すると1/16になります。これはArduinoのCNCシールドですが、Lerdge-X基板も同様です。
■電源について
24Vの電源については下記をおすすめします。容量は余裕があったほうがいいです。
・キーエンス スイッチングパワーサプライ MS-H75
・TDKラムダ スイッチング電源 ZWS150PAF-24/J
■商品の状態
多少使用感がありますが、状態は良好です。
本体には一切の変更を加えておりませんので、専用コントローラーでの制御も可能です。(専用コントローラーは付属しません)。
Lerdge-XやArduinoで動く電動スライダ オリエンタルモーター EZSM4D030C
商品コード
51267
商品の概要と仕様
Lerge-X(3Dプリンタコントロールボード)やArduinoで動く電動スライダ(オリエンタルモーターの「EZlimo」)です。
ストローク:300mm
可搬質量:水平15kg/垂直7kg
リード:12mm
繰り返し位置決め精度:±0.02mm
駆動方式:ボールねじ
詳細はこちらのメーカーの製品ページをご覧ください。
(本電動スライダの型番は「EZS4D030C」ですが、専用コントローラーとセットの場合の型番は「EZS4D030-C」となります。上記リンクは「EZS4D030-C」のページです。
ストローク:300mm
可搬質量:水平15kg/垂直7kg
リード:12mm
繰り返し位置決め精度:±0.02mm
駆動方式:ボールねじ
詳細はこちらのメーカーの製品ページをご覧ください。
(本電動スライダの型番は「EZS4D030C」ですが、専用コントローラーとセットの場合の型番は「EZS4D030-C」となります。上記リンクは「EZS4D030-C」のページです。
商品の状態
電動スライダが正常に動作することを確認しました。この動画はそのテスト運転のようすです。上の動画はLerdge-X、下の動画はArduino で動かしています。
この電動スライダは本来、専用のコントローラーに接続して使うものですが、動力は2相ステッピングモーターになっておりますので、Lerdge-X(3Dプリンタコントロールボード)や、Arduino(Grbl)での制御が可能です。本体には一切の変更は加えておりませんので、もちろん専用コントローラーでの制御も可能です。(専用コントローラーは付属しません)。
ところで、Lerdge-XやArduinoで電動スライダを制御できるなんて、すごくワクワクしませんか?
本来の使い方とは違う方法ではありますが、ものづくりの楽しさってこういうところにもある気がします。なので今回はLerdge-XやArduinoに接続して使う例をご紹介します。
以降の説明は、下記を前提としています。
・ArduinoとCNCシールドは、こちら(Amazon)から購入したものを使用しています。
・そのArduinoには、最新版のGrblをアップロードしています。
・Lerdge-X(3Dプリンタコントロールボード)はこちら(AliExpress)から購入したものを使用しています。
・Lerdge-Xのメーカーサイトはこちらです。
■配線について
この電動スライダの後部のカバーを外すと2つのコネクタがあり、ひとつは内部のモーターに、もうひとつはそのモーターに直結のエンコーダーに接続されています。今回はその2つのコネクタのうち、モーター側しか使いません。(専用コントローラーを使う場合はエンコーダー側も当然使います。)
このため配線はとてもシンプルです。当社で動作確認に使ったケーブルを付属しますので、よろしければお使いください。コネクタに差し込むだけで使えるようになっています。もしエンコーダーのほうも使いたいというお客様は、コネクタ(6P)を付属しますので、よろしければお使いください。この電動スライダにはアブソリュートエンコーダーが搭載されておりますので、活用してみるのも面白いと思います。)
■原点復帰について
専用コントローラーによる原点復帰は、「押し当て方式」といって、メカエンドに押し当てて反転し原点を確定する方式を取っています。GrblやLerdge-Xの原点復帰方法とは異なるため、それらで原点復帰を行うには、別途原点センサ(リミットセンサ)を設置していただく必要があります。
また、Grblの場合は、config.hを書き換えることにより、X軸またはXY軸だけで使用する場合も原点復帰ができますが、Lerdge-Xの場合はXYZの3軸が揃っていないと実行できません。(もしかしたらできるのかも知れませんが、その方法はわかりませんでした)
■ドライバ(A4988)の設定について(Lerdge-XやArduinoにA4988のドライバモジュールを搭載している場合)
A4988には、モータに電流が流れ過ぎないよう電流を制限する機能が搭載されています。その電流値は、下記の写真のようにドライバ基板上のボリュームを回しながら、ボリュームとGND間の電圧(VREF)を調整することで設定します。下記はその電圧(VREF)を算出するための計算式です。
Imax=Vref/0.4
この電動シリンダに装着されているステッピングモータは、正確な定格電流がわからなかったのですが、当社ではImaxを1.5Aとして設定してみました。この計算式にあてめると、VREFが0.6Vになります。ボリュームとGND間の電圧が0.6Vになるよう調整を行ってください。
なお、運転の頻度によって異なりますが、A4988の発熱が大きくなり、CNCシールドに付属のヒートシンクでは不十分になる可能性があります。その場合はヒートシンクを大きくするか、電流値を下げてご使用ください。
■Grbl、lerdge-Xの設定について
下記はArduinoで動かす場合のGrblの設定です。
$100(1mmあたりのステップ数)は、マイクロステップの設定が1/16、本体のボールネジのピッチが12mmなので、360度÷1.8度×16÷12mm=266.666pls/mmとなります。
$1は、次の動作に移るまでの停留時間ですが、255に設定すると停止時にもモータに電流を流し位置を保持します。電動シリンダは停止時にも位置を保持したいことが多いと思い255にしましたが、モーターもドライバモジュールも発熱も大きくなってしまいますので、用途にあわせて設定を変更してください。
そのほかの最高速度や加減速の設定は用途に合わせて調整してください。
先ほど「マイクロステップの設定が1/16」と書きましたが、CNCシールドの下記の青い枠のところにショートピンを3つ接続すると1/16になります。これはArduinoのCNCシールドですが、Lerdge-X基板も同様です。
■電源について
24Vの電源については下記をおすすめします。容量は余裕があったほうがいいです。
・キーエンス スイッチングパワーサプライ MS-H75
・TDKラムダ スイッチング電源 ZWS150PAF-24/J
■商品の状態
多少使用感がありますが、状態は良好です。
本体には一切の変更を加えておりませんので、専用コントローラーでの制御も可能です。(専用コントローラーは付属しません)。
在庫数
売り切れ