'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
三軸二足歩行ロボット
製作者の情報
| 製作者 | : | RyukiSato様 |
| : | 電気通信大学ロボメカ工房HumanoidRobot部門ブログ | : | 電気通信大学ロボメカ工房HumanoidRobot部門HP | : | 電気通信大学ロボメカ工房HP |
この作品での受賞歴
- 2012/12/18に開催された、「第6回RTミドルウェアコンテスト」での発表で、
デモ機として用い、【日本ロボット工業会賞】と【グローバルアシスト賞】の2つを受賞
使用している製品・部品
製作者のコメント
2足歩行ロボットの簡易的なモデルである3軸のロボットを、サーボモータの種類によって2機作りました。 「mini-CNC HAKU」を用いてA5052 t1.5のアルミ板を切削し、それらをサーボモータの色に合わせて「アルマイトキット 彩」でアルマイト処理を施しています。さらに、レーザー加工機でアルマイトした面に画像を彫刻しております。アルマイトをすることにより見た目がまるで製品のようになりました。
- サーボモータ:PRS-FF09PⅡ/PRS-S40M(Pirkus製)
- 電源:LiPo 7.4V 1100mAh(Hyperion製)
写真
 |
2種類のロボット外観 |
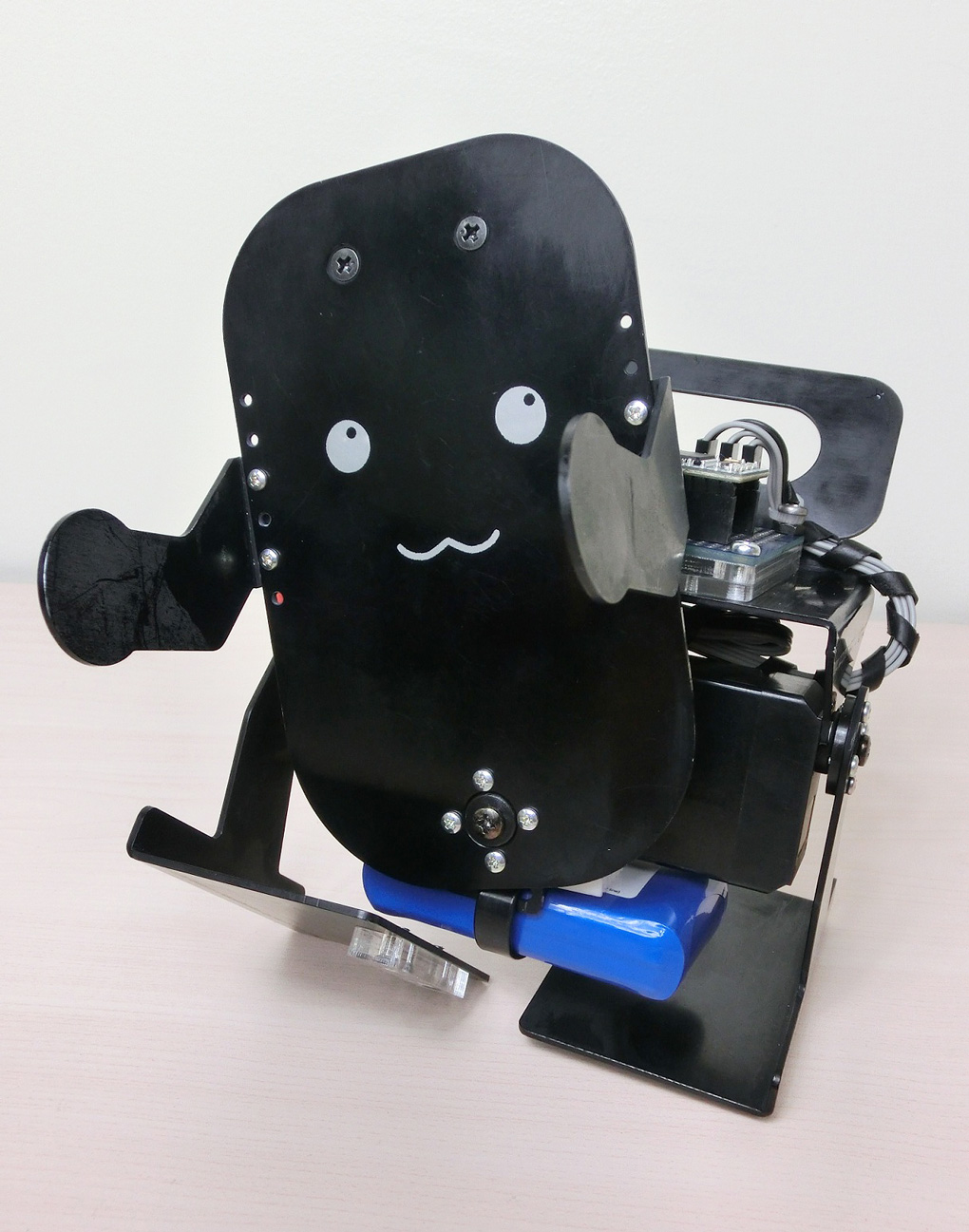 |
PRS-FF09PⅡ(Pirkus製)を使用したロボット |
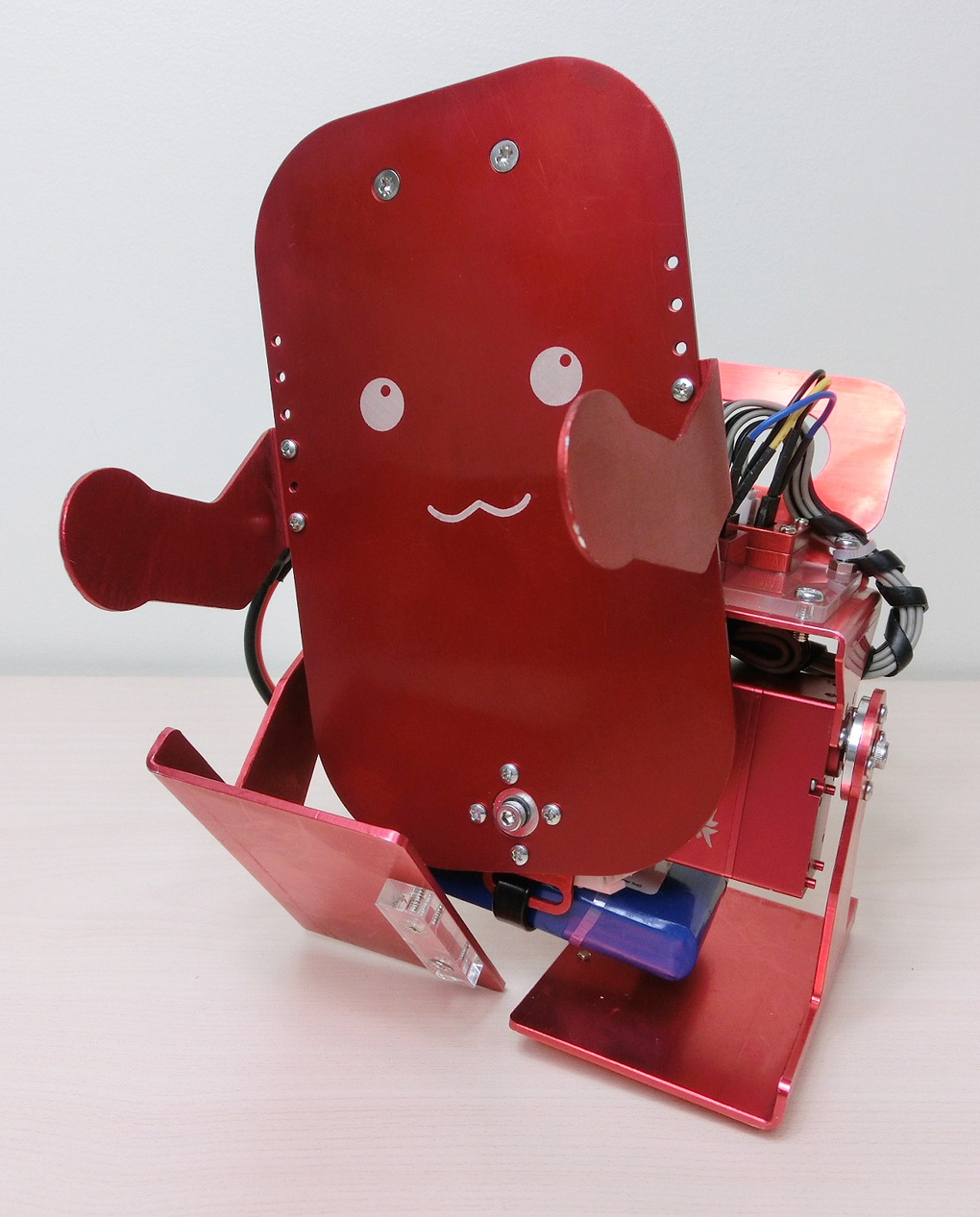 |
PRS-S40M(Pirkus製)を使用したロボット |
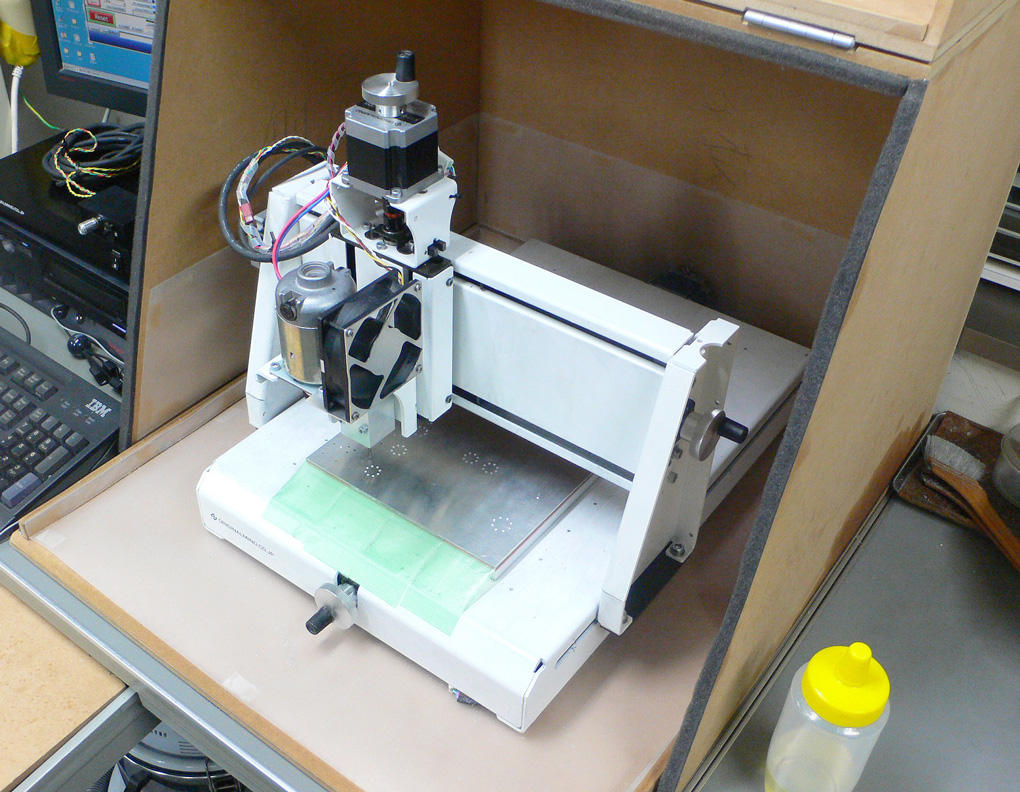 |
MakeTokyoMeeting07で購入したエンドミルを用いて HAKUでアルミフレームを切削中。 |
 |
曲げ加工等を終え、アルマイトを施したパーツ |
 |
アルマイトによる陽極酸化被膜を レーザー加工機で彫刻することにより剥離しました。 |
動画
動画中ではAndroid端末でロボットを操縦しています。
歩行以外にも様々なモーションができ、徒競走をさせたり
相撲をさせたりサッカーをさせたりして遊ぶことができます。