こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
製作者のコメント
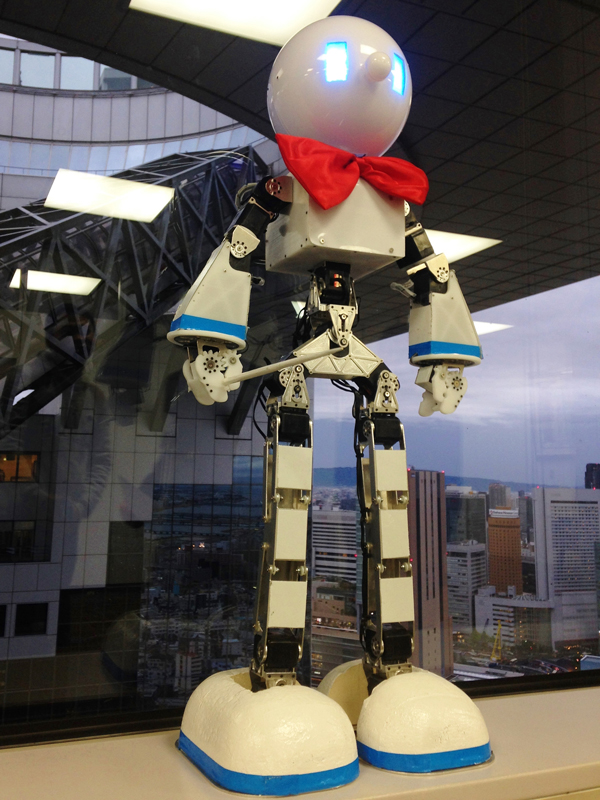
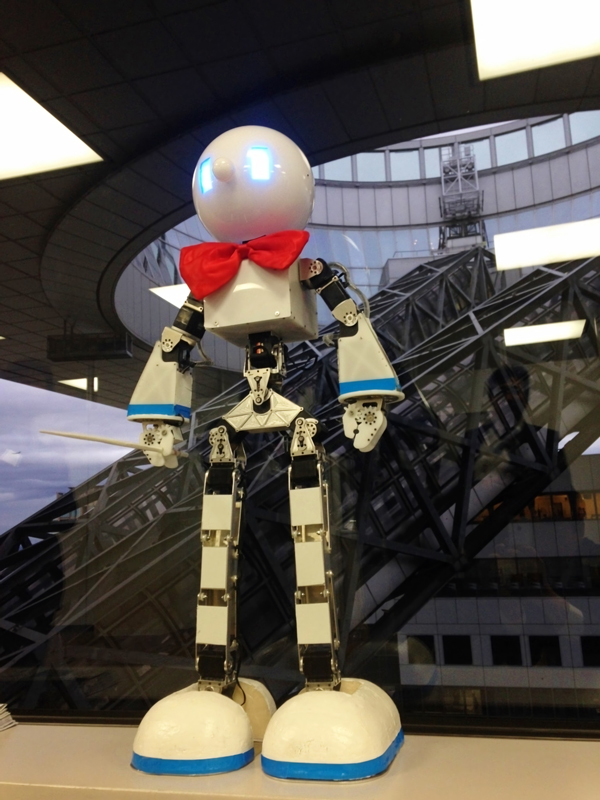
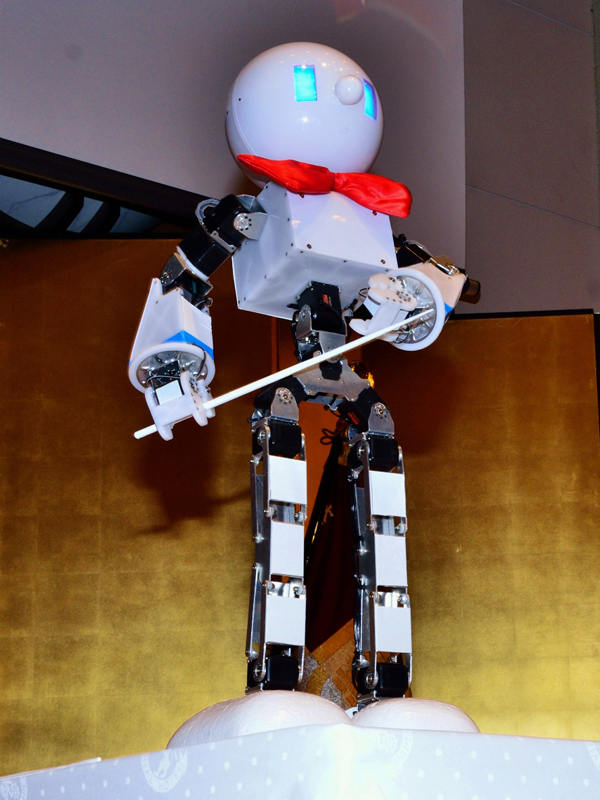
大阪工業技術専門学校120周年記念祝賀会にあわせて製作した指揮者ロボット「フクマス」(愛称:ふくちゃん)です。祝賀会ではジャズオーケストラの指揮をさせていただきました。
【式典の様子】
http://www.oct.ac.jp/topics/archives/2015/08/18/-120.php
【ロボットの仕様】
・身長 750mm
・重量 3.5kg
・電源 リチウムポリマーバッテリー HYPERION 3S/11.1V 45C 1600mAh
・CPUボード ヴイストン株式会社VS-RC003HV
・材料 A5052、A2017、A7075、ジュラコン、アクリル樹脂など
・動力 サーボモータ(詳細は下記の通り)
【サーボモータ配置】
・上半身のサーボモータ16個(頭2自由度、胴体2自由度、片腕6自由度)
・下半身のサーボモータ8個(片脚4自由度)
・全身でサーボモータ24個
■近藤科学 KRS4034HV
スペック(11.1V時、静止状態)
最大トルク:41.7kgf・cm
最高スピード:0.17s/60°
使用箇所 肩ピッチ軸x2、腰ピッチ軸x1、腰ロール軸x1、
太腿ロール軸x2、太腿ピッチ軸x2、足首ピッチ軸x2、足首ロール軸x2
■近藤科学 KRS4031HV
スペック(11.1V時、静止状態)
最大トルク:13.0kgf・cm
最高スピード:0.16s/60°
使用箇所 肩ロール軸x2、肘ヨー軸x2、肘ロール軸x2
■近藤科学 KRS-2552RHV
スペック(11.1V時、静止状態)
最大トルク:14.0kgf・cm
最高スピード:0.14s/60°
使用箇所 首ピッチ軸x1、首ヨー軸x1、手首ヨー軸x2、手ロール軸x2
製作者の情報
| 製作者 | : | 大阪工業技術専門学校ロボット研究部様 |
| Webページ | : | 大阪工業技術専門学校 |
主に使用している加工機械や部品
- KitMill RD420
- A5052、A2017、A7075、ジュラコン、アクリル樹脂など
CADデータ
| データファイル | : | フクマスキーホルダーの図面 |
写真
今回、大阪工業技術専門学校では120周年記念祝賀会が開催することになり、そこでのデモンストレーション用に二足歩行ロボットを製作し披露することになった。製作するロボットの目標は、ジャズオーケストラの前で指揮をさせることである。そのため、ステージ上でも視認できる様に、予算内でできるだけ大きいロボットが要求された。また、依頼から2か月半後が祝賀会という短い製作期間であった。
まず、予算と納期を解決するため、これまで使った経験のある市販のロボット用サーボモータとコントロールボードを採用した。次に、大きいロボットという要望には、印象を大きく見せる工夫で解決した。頭、手、足を大きくし、離れて見ても存在感のあるデザインにした。
また、大きく見せることだけでなく、親しみやすく可愛らしいデザインを心掛けた。外装には、ジュラコン(POM)やアクリル樹脂を用い、金属部の露出を少なくした。腕・脚は手先・足先にかけて徐々に幅が広がるデザインにし、腰はくびれをイメージしたデザインにした。手や頭部の動きは表情のないロボットにとって重要な感情表現だと考え、頭部に2自由度、腕には片腕6自由度(両腕12自由度)を設けた。
指揮者ロボットにおいて、特に手先の動きを重要と考えた。手のひらの開閉における印象の違いを示す。まず、この図では手を開き挨拶のようなジャエスチャに見える。
次に、この図では手を握り締めた拳の様に見える。
また、同じ様に手を開いていて上下に振る動きをさせる場合でも、手のひらが上を向いているのか下を向いているのかでジェスチャの意味が異なる。まず、この図では手のひらを下に向け、"下げる・弱く"といった印象だ。
次に、この図では手のひらを上に向け、"上げる・強く"となり、先ほどとは逆の印象になる。このように、手の自由度をふやすことにより、多彩なジェスチャが可能となる。
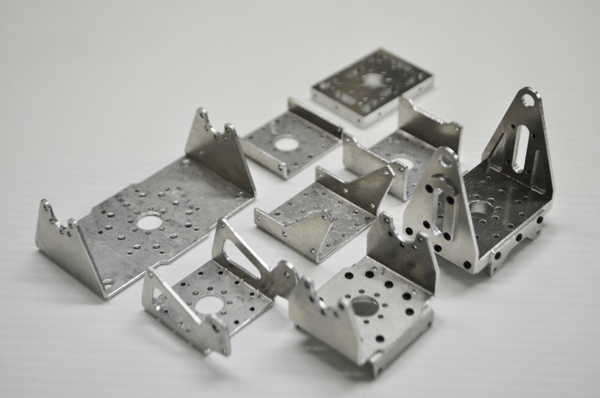
各関節のアルミフレームをできる限り共通化し、汎用的な設計をした。また、接続用の穴はイトーレーネツ製の汎用アルミフレームSC-4000シリーズと互換性を持たせた。これらにより、設計の簡易化、予備パーツの統一化を図った。また、今後の同じKRS-4000シリーズのサーボモータでロボットを開発する際に部品を流用することも可能になる。
脚部ピッチ軸間は平行リンク機構を用いた。歩行時、常に左右の足裏が平行に動作するように設計をした。これにより市販の二足歩行ロボットによくある膝サーボモータの遅れによる不安定さが解消され歩行モーションの制作が簡易化できる。また、コスト面からも高価なハイトルクサーボモータが2個削減できるメリットがある。
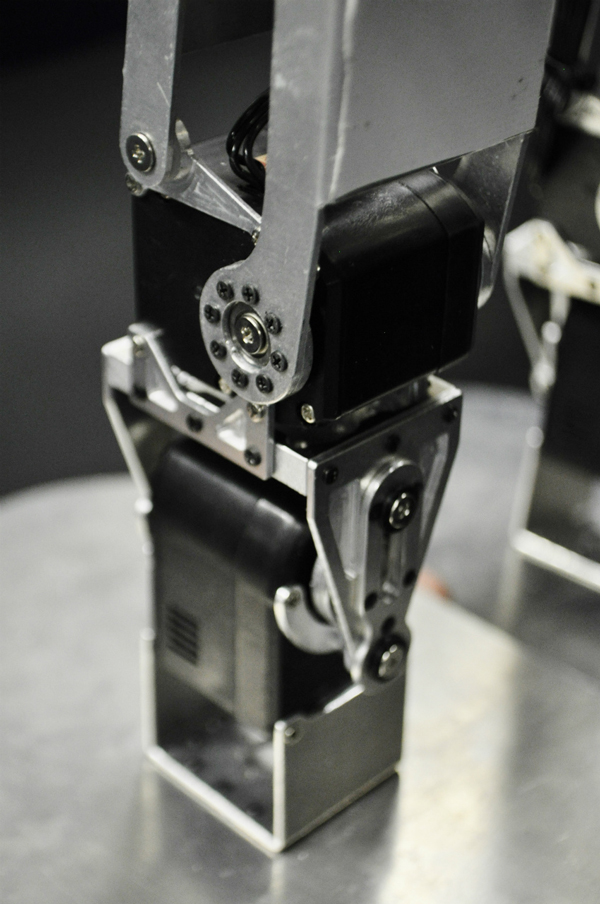
股、足首、腰のサーボモータには他の軸に比べ負荷が大きくモーション制作時にトルク不足を実感した。その問題を解決するため搖動スライダークランク機構を応用した長穴減速機構を制作した。減速比については1/2となるように設計を行った。

また、トルクが上がることでアルミフレームへの負担が増えることも考慮し、当初、A5052を使用していたが、材質をより剛性のあるA2017に変更した。材質を固くしたことで曲げ加工ができなくなったが、削りだし部品の側面にねじ穴を設けることで解決した。
結果として、工程数が増え加工時間が増えることが欠点だが、剛性と軽さの両立ができ精度も出やすい事が優れた点である。
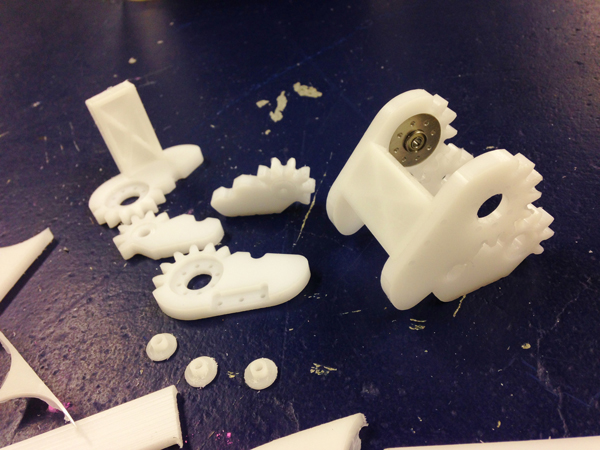
手の開閉には歯車を用い一つのサーボモータで動作するように設計した。歯車はフレームと一体化した設計となっており、指の開閉角度は設計時にギヤ比を変更することで任意の動作が可能である。
今回は開いた時と閉じたときの両方のデザインを考慮し、親指がほかの指に比べ大きく動くよう設計を行った。

サーボモータ24個を使う今回の指揮者ロボットにはサーボホーン24個、フリーホーン17個が必要になる。仮に1個1000円とすると4万円を超えてしまう。
予算を浮かし、購入できるハイトルクサーボモータの数を増やすため今回サーボホーン、フリーホーンを自作した。将来的に拡張する可能性を考慮して純正サーボホーンと同寸法で制作をした。セレーションは1枚飛ばしで設計し1mmのエンドミルで仕上げた。
制作にあたって両面加工が発生したが、治具を制作することで加工に成功した。フリーホーンは切削した部品にボールベアリングを圧入するため、比較的簡単な加工であった。
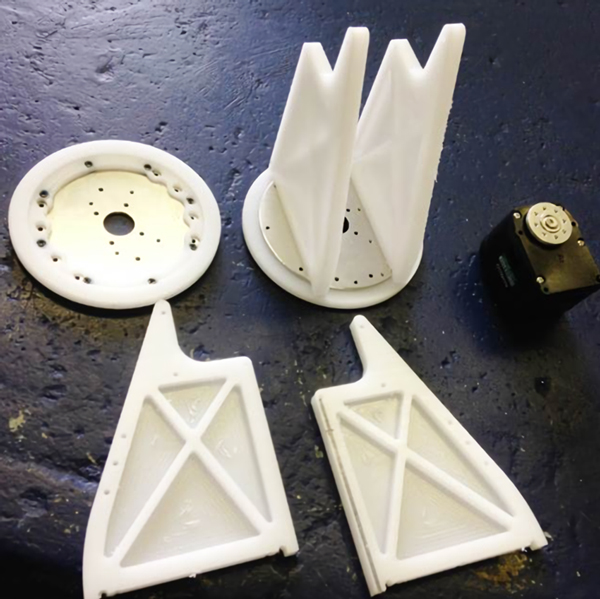
剛性を保ちつつ重量を軽くしたいと考え、アルミ、ジュラコンにポケット加工を行った。特に上半身は軽量化が必要と考え、胴体と腕はジュラコンを外装兼構造体として使用した。
頭部の内部フレームはジュラコンで製作した。内側のサーボモータ固定部から外側の外装固定部へは蛇腹状のジュラコンで繋ぎ、転倒時などの衝撃から頭部の破損を防ぐ機構とした。目のLED部分には上下左右をジュラコンで囲みシェードの役割をする。組み立て後、内側にアルミテープを貼り光が漏れない様にした。
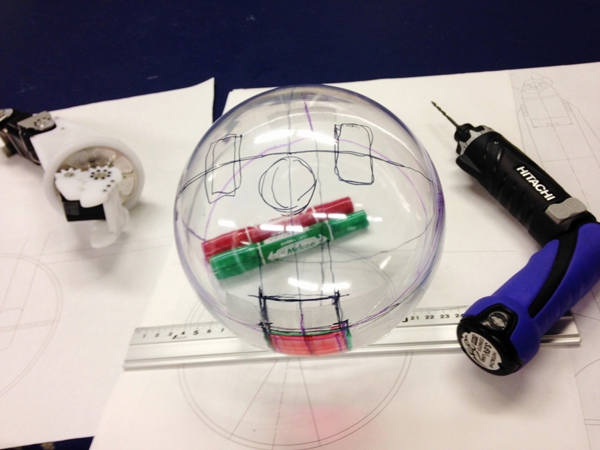
頭部はアクリル球を加工し製作した。頭頂部にはスピーカを搭載した。

頭部はエンクロージャの役割にもなっており小型のスピーカでも音量を出すことができる。またエンクロージャのダクトが口元に来ており、マイクを口元へ近づけると音声を拾うことが可能だ。
サーボモータに合わせ近藤科学製のコントロールボードを使うことも検討したが、音声出力が無い点、ソフトウェアの習得に時間がかかる点から、 これまで使用経験のあったヴイストン株式会社のVS-RC003HVを採用した。VS-RC003HVのプログラムは専用のPCソフトRobovieMaker2を使いモーションデータを制作することができる。
今回、このロボットで最も重要なモーションは曲に合わせて指揮をする事である。VS-RC003HVでは通常、遷移時間の単位は60Hz(近似値0.017秒)に設定されており、遷移時間060stepが約1秒に相当するようになっている。指揮をする校歌のテンポは107bpmで4分の4拍子の曲である。
テンポとは1分間における拍の数なので1拍あたりの時間は60s÷107bpm≒0.561sであり、またstep数をXとすると60:1=X:0.561となりX≒33.66となる。1拍にタクトを振る時間は上記で計算したので、指揮のモーションはそれに合わせてポーズを作り4セットのポーズをループさせて1つのモーションとした。
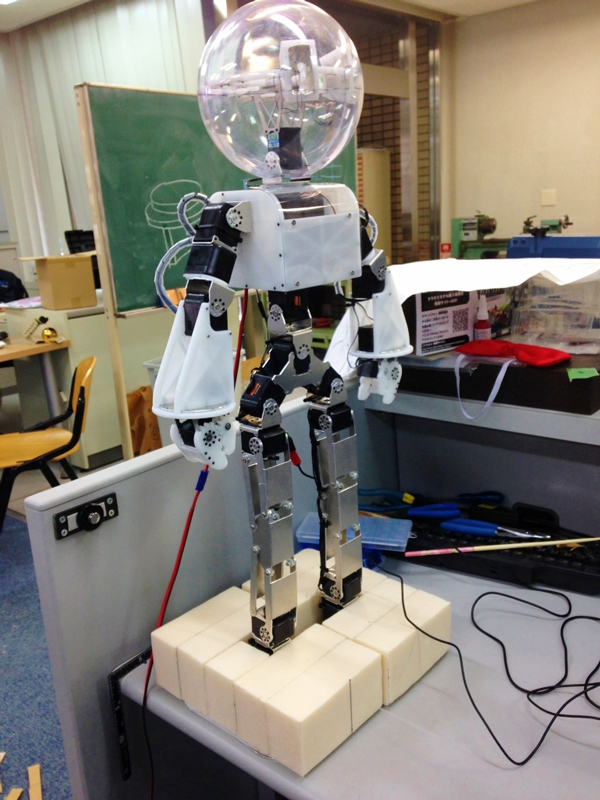
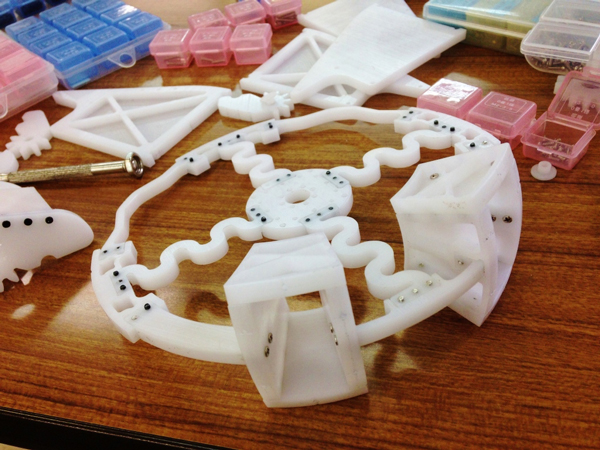
上の写真はモーション製作時の様子である。外装製作と並行してモーション製作することで短期間での作業を可能とした。ロボットを運用する際、予期せぬ環境や状態に陥りサーボモータがロック状態もしくは過負荷がかかった状態になることがある。それを放置すれば過電流が流れサーボモータの制御回路やモータが壊れることになる。そのため、必要に応じてサーボモータを脱力させる必要がある。VS-RC003HVでは信号をOFFにし脱力するように設計されており、大半のサーボモータはこれで脱力状態になる。
しかし、近藤科学製のロボット専用サーボモータ(ICS3.5規格)は信号をOFF にしても脱力せず最後の角度を保持する設計になっている。脱力をするためには50μsec信号を送る必要があるが、VS-RC003HVでは通常50μsecの信号が出せない設定になっている。このため、可動範囲の設定を変更して可動域を広げ、 50μsecの信号がでるポーズを作りモーションとし登録し、その脱力モーションを任意のボタンに割り当てることで、脱力することが可能となった。
二足歩行ロボットとして制作しているので、歩行することは最低条件であった。今回、新たな挑戦として腰ロール軸使い膝を曲げない歩行を目指してモーションを制作した。
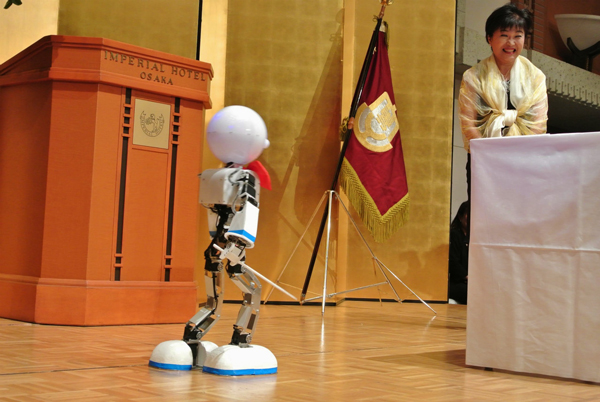
しかし、膝を曲げない歩行はできたが、満足のいく安定した物には製作できなっかた。本番では、これまでの二足歩行ロボットと同じ腰ロール軸を使わない膝を曲げた歩行を制作すること解決した。写真は祝賀会本番でフクマスが壇上を歩く様子である。

祝賀会本番では壇上で校歌斉唱を樋口さち江氏が行い、その横でフクマスが指揮を行った。

フクマスの指揮は直接ジャズオーケストラにするのではなく、フクマスの指揮に合わせ、指揮者の白井克治氏が演奏の宝塚シルバーソニックオーケストラの指揮する間接的な方法で行った。直前までいろいろな不備やトラブルもあったが祝賀会を無事に終わることができ、周囲の先生方や来賓の方からの評判もよく、いい結果で終わることができた。

その後の活動は、オープンスクールでデモンストレーションなどを行っている。近畿ロボリーグでは、コンクールデレガンス部門において1位を獲得した。また、校友会の総会では感謝状をいただき、懇親パーティにも招待していただいた。今後も活躍の場を増やしていきたいと考える。

最後に、このロボットの図面を公開することも検討したが、図面データの整理に時間が必要であり、現在、卒業制作の締め切りや二足ロボット競技会参加の準備で時間を捻出できないため、残念ながら公開は見送る。その代わりに、ノベルティグッズとして製作したフクマスキーホルダーの図面を公開する。フクマスのデザインを気に入った方は是非製作してほしい。