'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
超小型二足歩行ロボット玩具
製作者の情報
| 製作者 | : | Piccolo様 |
使用している製品・部品
製作者のコメント
1個の動力で完全な二足歩行するロボット玩具を考案しました。動作確認のために、人気の超小型のラジコンヘリコプターを分解し、そのモーターと2ch送受信機を用いて歩行と旋回ができる、世界最小の完全な二足歩行ロボット玩具を製作しようと考えました。ヘリは数千円で購入でき部品代としては安価であり、超小型にすることで更に製作する魅力を感じました。
ヘリコプターに使われているモーターは、メインローター用が外径6mmを2個とテールローター用が4mmと小さいので適合するギヤーが市販されておらず、ヘリコプターのギヤーとラジコン用のマイクロサーボを分解して使用しました。その他のほとんどの部品は設計製作しましたが、加工よりも1個の動力で歩行する機構の設計に一番時間が掛かりました。
歩行機構は、脚の歩行リンクと足首傾動リンク機構のリンク機構のみで構成されており、1個の動力でクランクを回転すると完全な二足歩行動作をします。また重心を移動した方向に錘の手が付いた腕を振ります。
今回の試作品は旋回もできる2号機の大きさが137mmで歩行のみのなら100mm程度の大きさも製作可能です。

写真
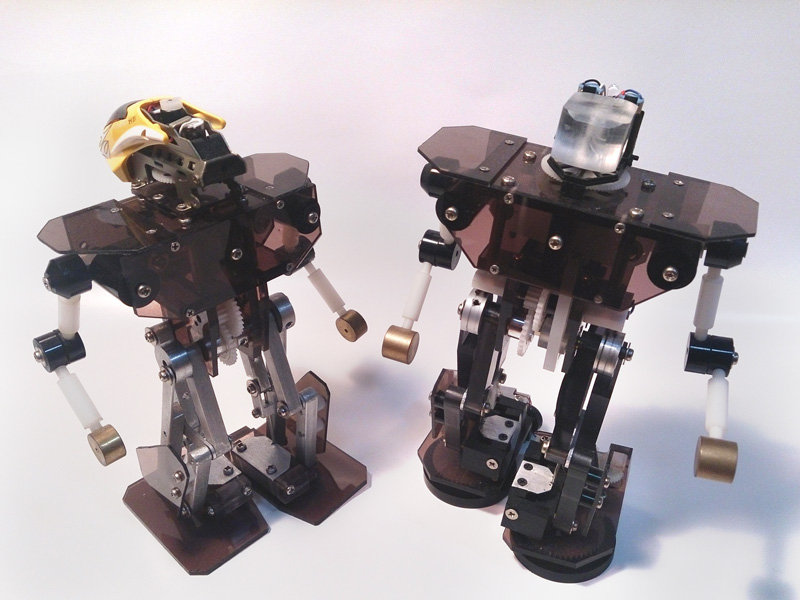 |
試作1号機(左):歩行のみ(ヘリコプターが頭になっています) 試作2号機(右):歩行+左右の旋回動作(歩行しながら旋回します) |
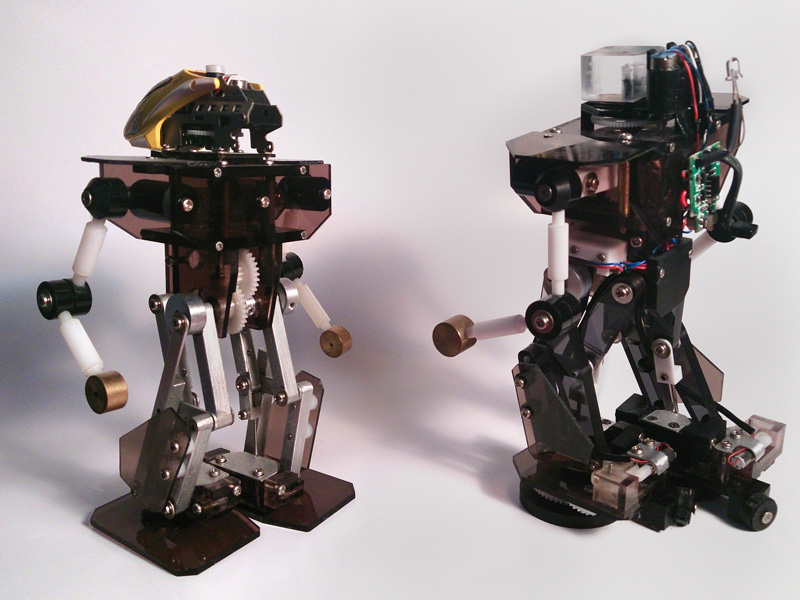 |
試作1号機(左) 試作2号機(右) |
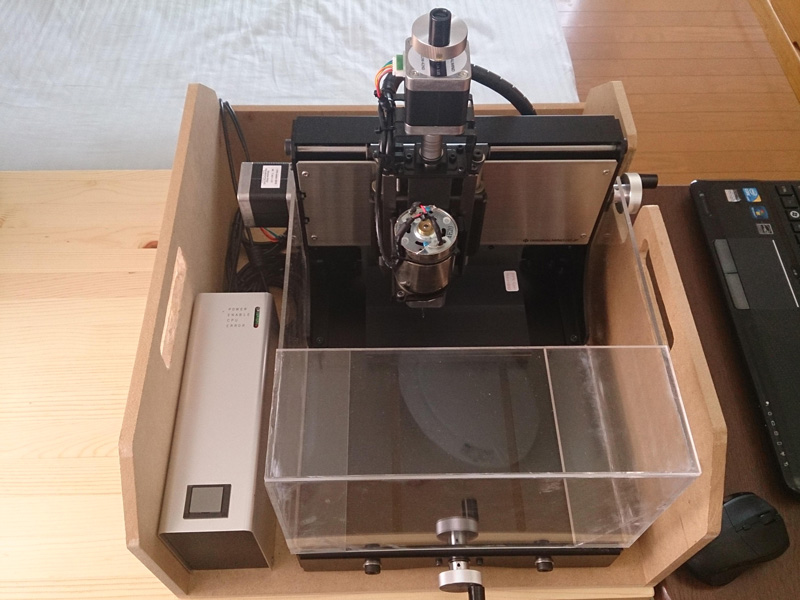 |
KitMill BT200の加工台(持ち運びが容易な取手付きです) |
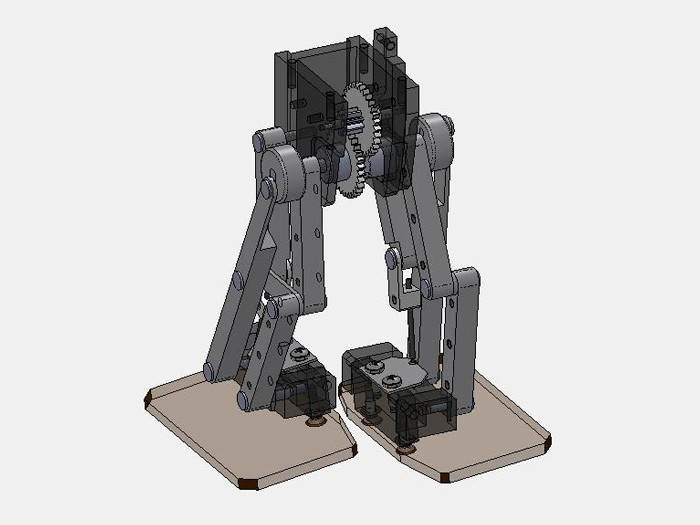 |
試作1号機の脚部 脚の歩行動作をするチェビシェフリンク機構は知られていますが、これだけでは歩行はできません。今回考案した部分は脚の歩行リンクの動きを足首傾動動作に変換するリンク機構であり、1個の動力でクランクを回転すると完全な二足歩行動作をします。また、脚と足首のリンク機構は構造が簡単なので更に超小型化が可能です。 |
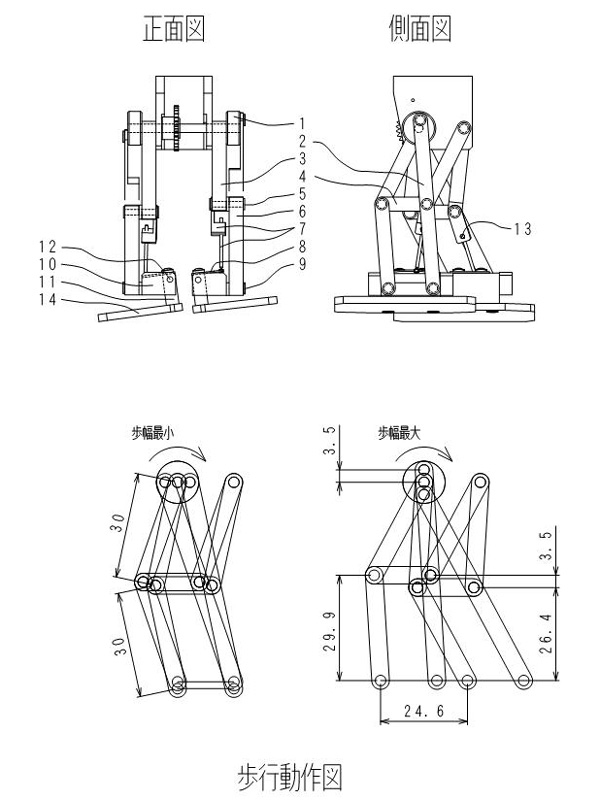 |
足首傾動リンク機構(上)と脚歩行リンク機構(下) 脚の歩行動作の膝の上下運動を足首の傾動運動に変換するリンク機構により、両足の足首を左右に交互に跳ね上げと蹴り上げ動作をすることで体重移動を行い歩行します。 足首は、両足が揃った状態で直立し開脚時に左右に傾動動作をします。(動画を見てください) |
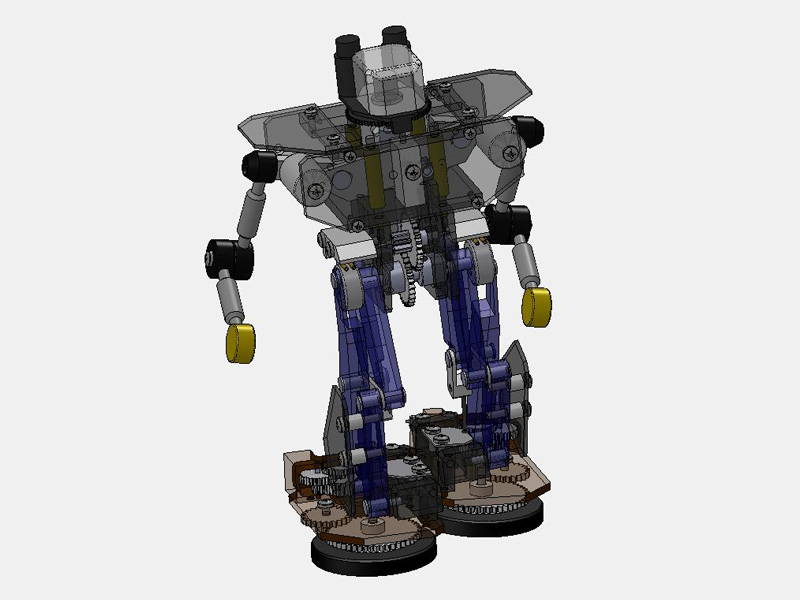 |
試作2号機の全体図(歩行+旋回動作) ★腕を左右に振る機構が付いています。 これは、二足歩行の動作らしく見せるためと、手の真鍮製の錘を左右に振ることで重心移動の補助をします。 実際は、手の錘が無くても二足歩行しますが、体の傾動角度を小さく設定することで自然な歩行に見えます。 ★旋回動作用の円板足が両足裏に付いています。 Φ4モーターで駆動しますがモジュール0.2のウォームギヤや平歯車で1/5000に減速しています。 ギヤボックスやシャフトも加工しましたが、小型に作るのが難しいです。また、旋回用円板足の径を足幅以下にすると転倒するので旋回用補助車の取付と位置が重要です。 ※旋回機構が無く振動モーターで足裏の爪の振動で旋回させて、左右の足の回転方向を変えれば更に超小型にでき旋回用補助車も不要にできます。3号機で試作します。 |
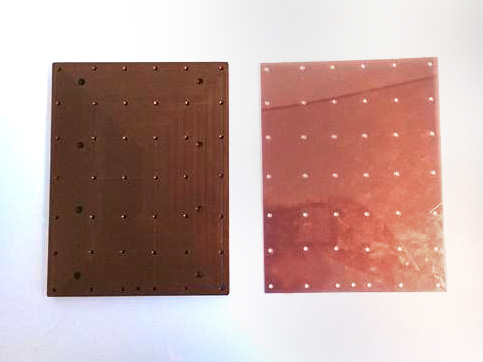 |
テーブルは平面加工後に材料固定用の42-M4ネジを加工(左) 材料に取り付け穴をけがくためのテンプレートは、42-M4ネジの下穴をテーブルと同時加工(右) |
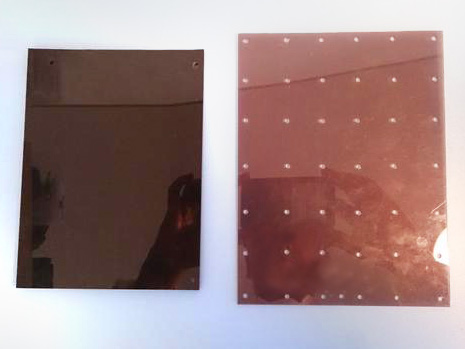 |
材料の大きさに合わせてテンプレートのM4ネジ下穴を使用し固定用の穴をけがきΦ4の穴を加工(左) |
 |
材料を10mmのスペーサーで浮かせてM4ボルトで固定(材料の着脱が容易に行える) ※捨て板が不要で、何より両面テープで張り付けた材料をはがす手間が無くスクレーパーで傷を付けない。 |
 |
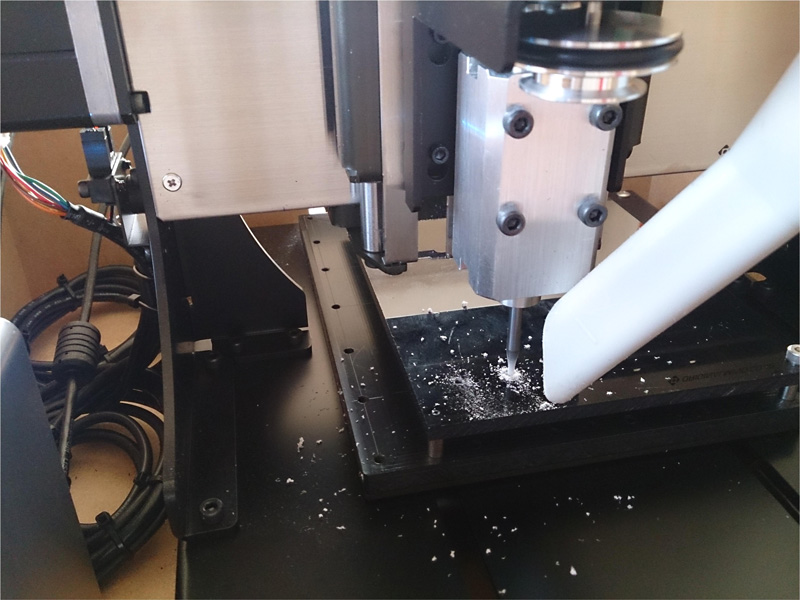
2号機用アクリル製 「ロボット脚部の加工時間2時間 (エンドミル径:2mm、板厚:5mm) 次に、原点復帰しエンドミル径:1mmに変えてM2ネジ下穴を追加加工します。 |
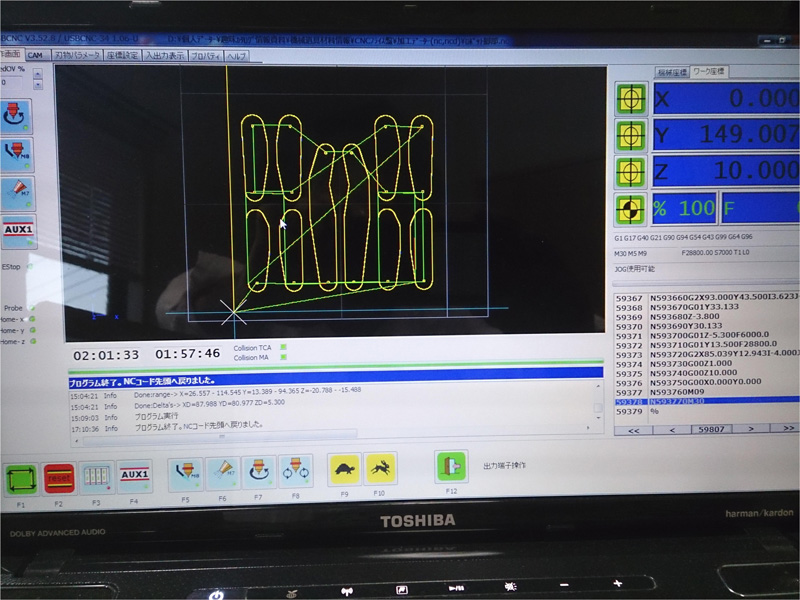 |
USBCNC3で2号機用アクリル製「ロボット脚部」を加工中 |
動画
超小型ロボットの歩行動画1
超小型ロボットの歩行動画2
KitMill BT200での加工動画