'',
'checked' => array(),
);
$ss_id = $_COOKIE[$key];
if (! $ss_id) {
return $result;
}
$database = yaml_parse_file($yml);
$hash = $database[$env];
$mysql = mysql_connect($hash['host'], $hash['username'], $hash['password']);
if (! $mysql) {
return $result;
}
mysql_select_db($hash['database']);
mysql_query('SET NAMES utf8');
$ss_id = mysql_real_escape_string($ss_id);
$pref = mysql_query(
"SELECT * FROM `preferences` WHERE `key` = '$ss_id';"
);
if (! $pref || mysql_num_rows($pref) == 0) {
return $result;
}
$row = mysql_fetch_assoc($pref);
$result['user_name'] = $_COOKIE[$alive] ? $row['user_name'] : '';
$result['checked'] = syck_load($row['checked']);
}
return $result;
}
}
$i = fetch_rails_info();
if (empty($i['user_name'])) {
?>
こんにちはゲスト様。MYページへはログインしてください。はじめての方はこちら(会員登録ページ)。
こんにちは様。 ログアウト
originalmind オリジナルマインド
RoboCup SSL用ロボット
製作者の情報
| 製作者 | : | 浅神製作所様 |
| Webページ | : | OPAmP Official HP |
使用している製品・部品
製作者のコメント
RoboCupという競技のためのロボットです。RoboCupには様々な種目があるのですが、その中のサッカー小型リーグのためのロボットです。試合では敵味方6台ずつ合計12台のロボットが、PC上のAIによる自動操縦でサッカーを行います。トップレベルのチームの試合となると、人間がラジコン操縦で戦ったとしても勝つことはほぼ不可能なほど、高速かつ巧みな連係プレーを見ることができます。
今回出品するロボットは弊チームの2013年モデルで、世界初となる可変キック角度機構を搭載しています。これはロボットの向きを変えることなく斜めにボールを蹴り出すことのできる機構で、人間で言うノールックパスのような動作を実現し、戦略の幅が大きく広がりました。
ロボットはボールを前方に蹴りだす機構の他に、空中に蹴り上げるチップキック機構、バックスピンをかけることでボールを機体に吸い付かせるドリブル機構、そして高速に全方向移動を行うためのオムニホイールを搭載しています。
ルールで定められた直径180mm,高さ150mmという限られたスペース中に、すべての機構と制御回路を詰め込む必要があるため設計には非常に苦労します。
ロボットに構造の必要な強度に応じて材料・加工機を使い分けていて、HAKUではPOMの樹脂板加工、KitMillではアルミを主に加工しています。

ロボット詳細
| 直径 | : | 178mm |
| 全高 | : | 146mm |
| 重量 | : | 約2kg |
| 電源 | : | リチウムポリマバッテリ4cell 2200mAh |
| 主要素材 | : | アルミニウム合金, POM |
| モータ(駆動用) | : | Maxon EC45 flat 30W |
| モータ(ドリブルローラー用) | : | Maxon EC16 30W |
| 車輪 | : | 自作オムニホイール |
| 最高移動速度 | : | 3.5m/s |
| ボールキック速度 | : | ~8m/s ※ルールにより8m/sが上限と定められています |
| 無線 | : | IEEE802.11a |
写真
 |
弊チームの2013年モデルとなるロボットです。 |  |
削り出しによって製作したオムニホイールのフレームです。写真では分かりづらいですが、裏側がPOM、表側がA2017の2層構造になっています。 |
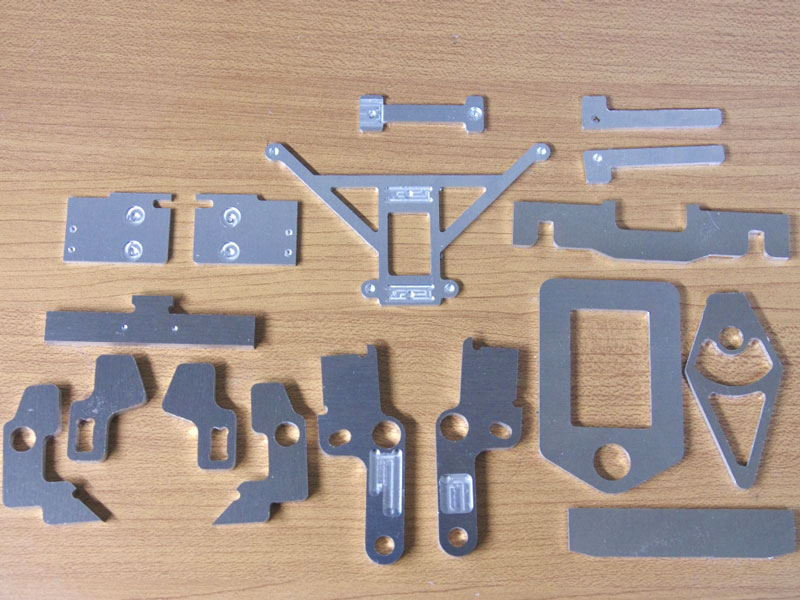 |
KitMillで削り出した部品達です。これらは主にドリブル機構やキック機構の部品です。 |
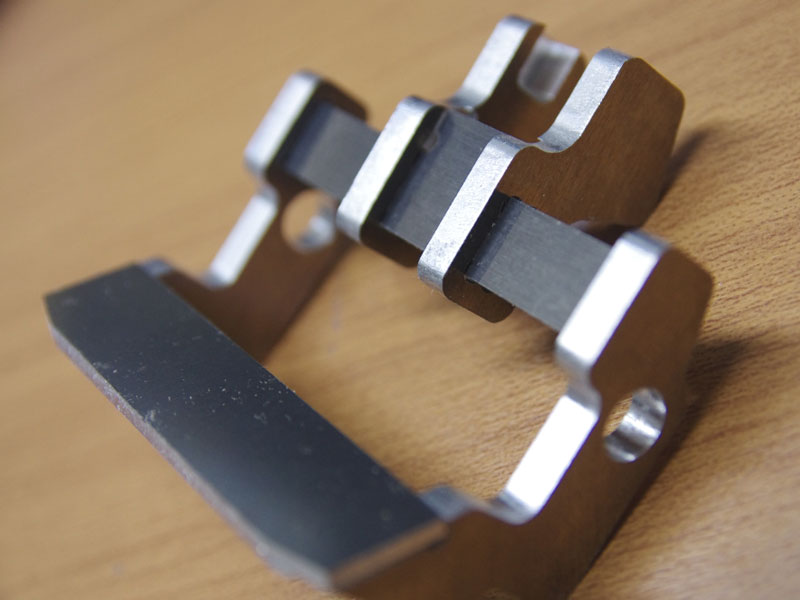 |
チップキック機構の部品です。試合中ではボールを浮かし、相手のロボットを越えてパスを出すことができます。 |
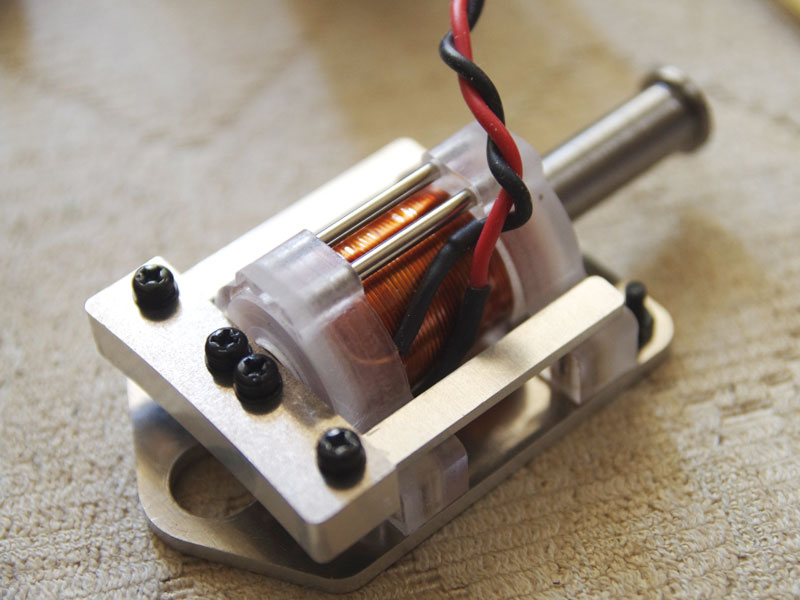 |
こちらはボールを前方に打ち出し、味方にパスを出したり、直接相手のゴールを狙ったりするための機構です。ソレノイドと呼ばれる駆動装置により可動します。 |
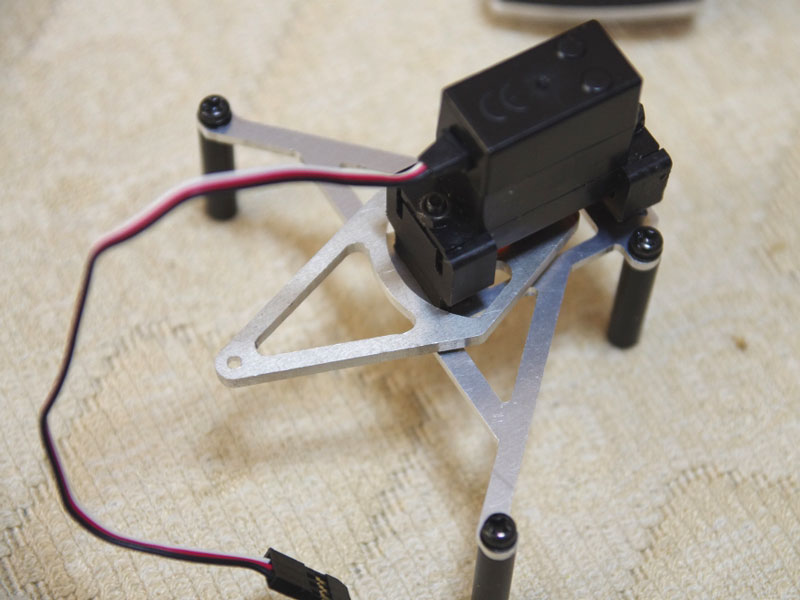 |
サーボユニットと呼んでいる部品で、キック角度を変更する要となるユニットです。このサーボが上記のユニットを動かし、左右30度の範囲でキック角度を変更することができます。 |
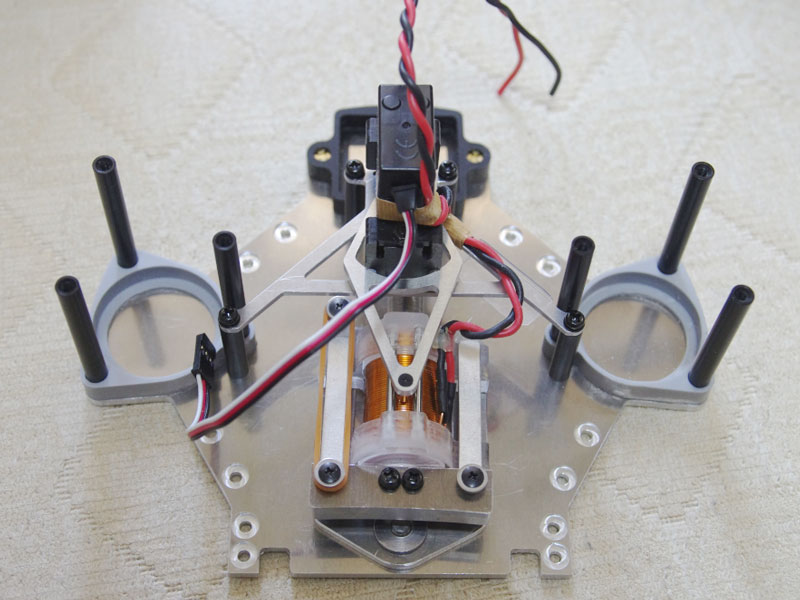 |
可変キック角度機構を機体に組み付けた状態です。キック機構周辺に駆動用のモータが配置され、さらにこのユニット自体も可動するため、ケーブルの取り回しが最も難しい部品です。ケーブルには柔軟性に富んだシリコンケーブルを用いています。 |
 |
ロボットの制御回路を載せるスペースと天板です。天板は画像認識用のマーカーが乗るだけの地味な部品ですが、ここの精度が悪いと画像認識で得られる位置・角度情報に影響が出るので手は抜けません。 |
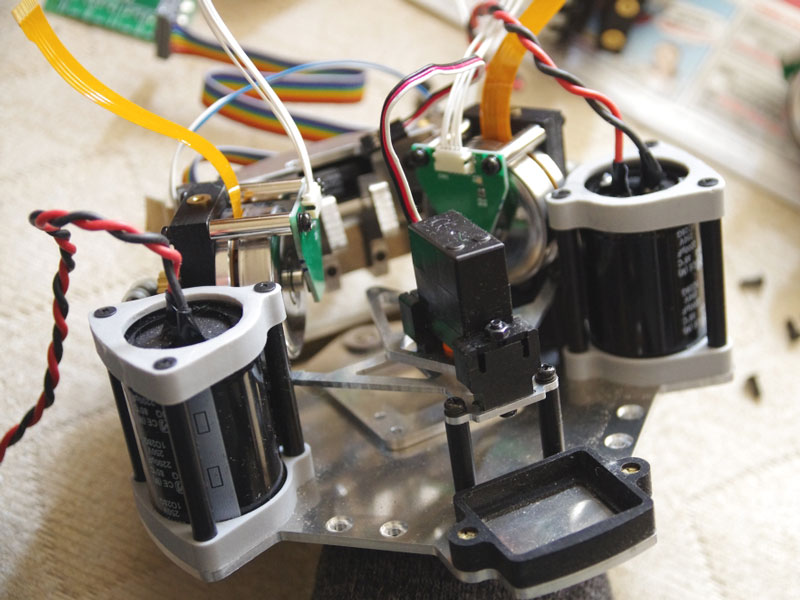 |
個別に組み立てた各部ユニットを組み上げていきます。取り付ける順番を間違えると組み立てられないのですが、スペースの制約が厳しく複雑なため、設計担当者でもたまに間違えてしまいます。 |
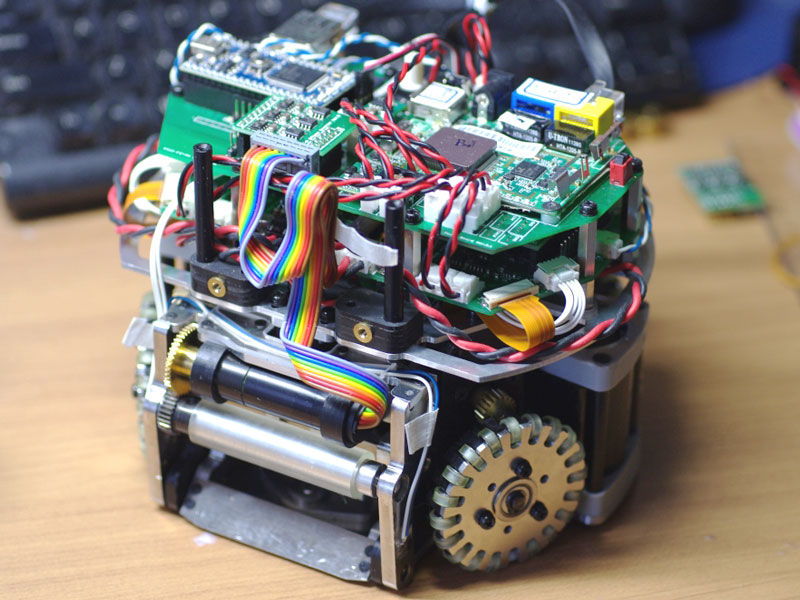 |
ほぼすべての部品を組み付けた状態です。 |
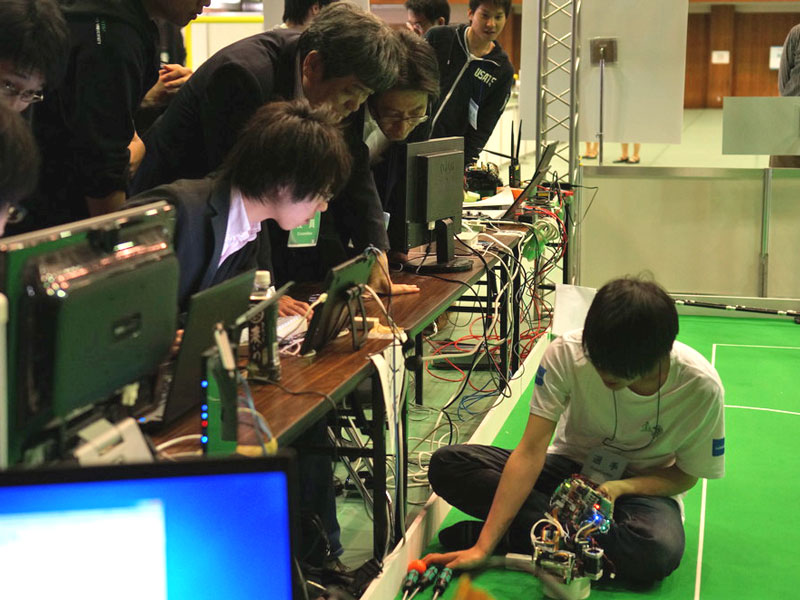 |
会場で可変キック角度機構を披露している様子。世界初の試みということもあり、他チームから多くの注目を集めました。 |
 |
試合の合間にロボットを分解しメンテナンスを行っている様子です。試合では敵味方双方のロボットが激しく衝突する場面もあり、壊れてしまうこともあります。 |
 |
メンテナンスを終え、試合に備えるロボット達。ロボットの頭がカラフルですが、よく見ると1台ずつ配色が異なっており、これが背番号やチームユニフォームのような役割をします。 |
 |
試合前にロボットの動作を確認しているところ。会場の大きなフィールドを使える機会は試合の合間しかないため、非常に限られた時間で問題を洗い出して調整する必要があります。 |
 |
キックオフを待つ両チームのロボット。試合中はロボットに手を触れることが許されないため、ロボットが壊れないように祈りながら応援するだけです。 |
 |
MakerFaireに出展したときの様子です。大会の他にもこういったイベントに参加し、RoboCupの紹介や、チームの宣伝活動なども行っています。 |
動画
作成したロボットと大会の様子を紹介した動画です。